|
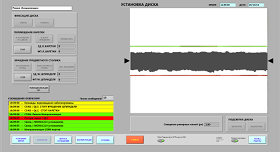
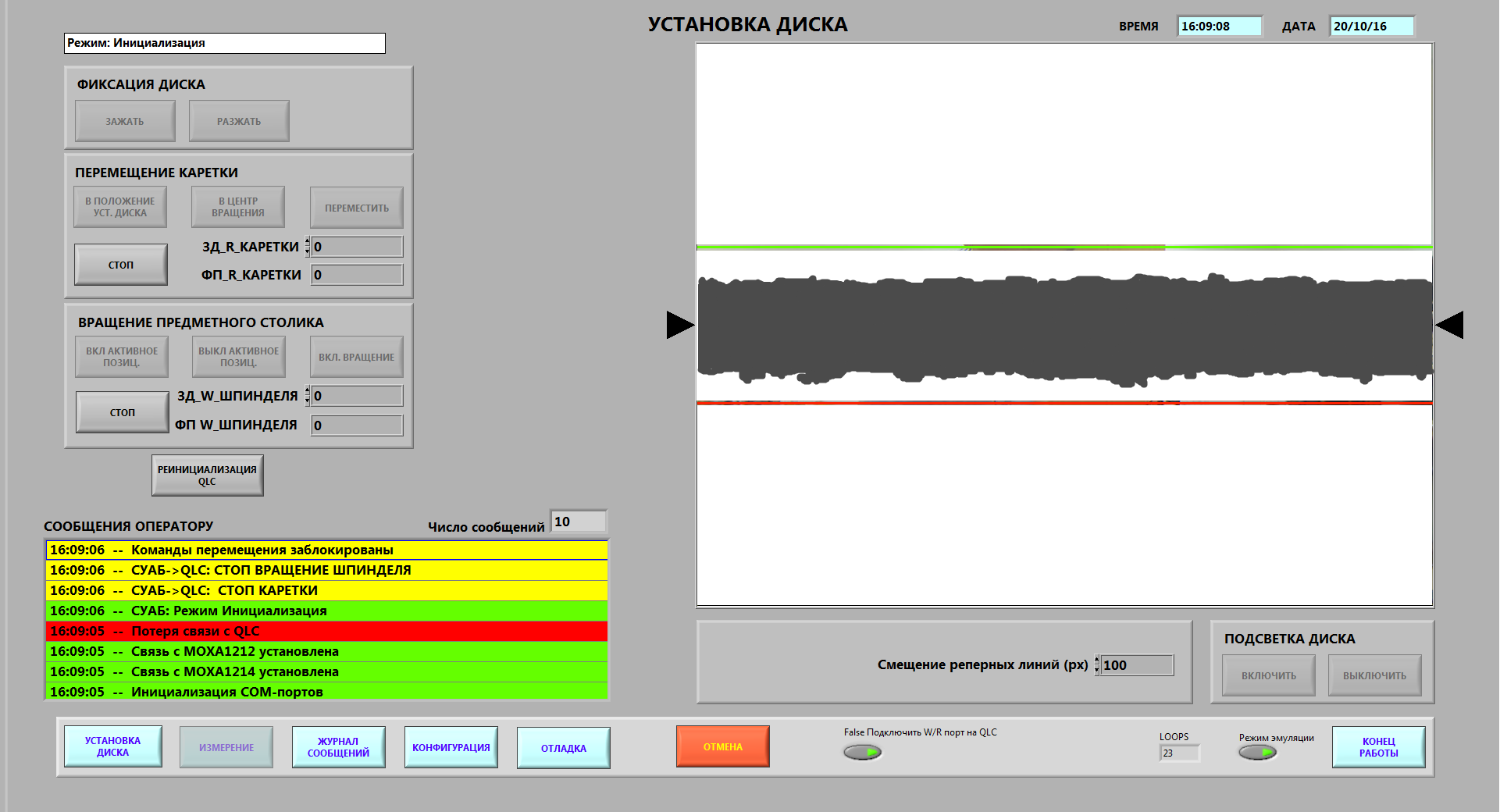
Рис. 1. Экран оператора системы управления углоизмерительной машиной АЭ.1686
|
Предложена программная архитектура управляющей системы на базе графической оболочки LabVIEW, реализующей интерфейс оператора и взаимодействие с периферийными устройствами, в том числе мультимедийными, и событийно-управляемого алгоритмического блока (СУАБ), специфицируемого на процесс-ориентированном языке Рефлекс и интегрируемого как исполняемый dll-модуль штатными средствами LabVIEW. Взаимодействие модулей в системе производится через механизм сообщений, реализованный посредством очередей LabVIEW (queue). Обмен с СУАБ организован по четырем каналам: канал входных дискретных переменных, канал дискретных выходных переменных, канал входных сообщений и канал выходных сообщений. Единичное сообщение состоит из трех элементов: код сообщения, параметр сообщения и тег параметра. Дискретные входные-выходные переменные передаются как массивы. В качестве редактора используется Notepad++, расширенный конфигурационным файлом синтаксиса языка Рефлекс. Согласование констант между СУАБ и LabVIEW производится через VI-подпрограмму, разбирающую сгенерированный транслятором Рефлекс файл-описание констант. Команды оператора преобразуются в сообщения по событиям, через структуру event. Предложенный подход обеспечивает сокращение трудозатрат на реализацию сложных управляющих программ для научно-исследовательских и экспериментальных комплексов.
Произведена практическая апробация подхода на задаче создания системы управления углоизмерительной машиной АЭ.1686 (рис. 1). ПО системы управления углоизмерительной машиной АЭ.1686 архитектурно состоит из СУАБ и функционально-интерфейсного комплекса, реализуемого средствами LabVIEW. Функционально-интерфейсный комплекс включает графический интерфейс оператора, модуль взаимодействия с контроллером углоизмерительной машины (КУИМ), модуля взаимодействия с модулями сопряжения MOXA, модуля управления сервоприводами QLC и вычислительный модуль обработки результатов измерений. Для связи с имеющейся в составе USB-камерой используется библиотека OpenCV. В системе предусмотрены ведение журнала работы с возможностью просмотра, конфигурирование и калибровка, режим отладки и режим аварийного приведения машины в безопасное состояние. отладку.
Публикации
1. Лях Т. В, Зюбин В. Е. Верификация промышленных алгоритмов управления методом Model checking в сочетании с концепцией виртуальных объектов управления // Системная информатика, 2016, № 8, С. 11-20
2. Лях Т. В., Зюбин В. Е., Сизов. М. М. Опыт применения языка Reflex при автоматизации Большого солнечного вакуумного телескопа // Промышленные АСУ и контроллеры. 2016. № 7. С. 37-43.
3. Сизов. М. М., Зюбин В. Е., Лях Т. В., Медведев А. М., Семенов Ю. И. Использование языка Caph для обработки видеосигналов в системе автоматизации электронно-лучевой сварки // Промышленные АСУ и контроллеры. 2016. № 6. С. 38-43.
|

")
")