Научные и прикладные результаты лаборатории 09
Результаты 1997 - 2025 гг.
Управление сложными динамическими объектами
Супервизорное управление
|
|
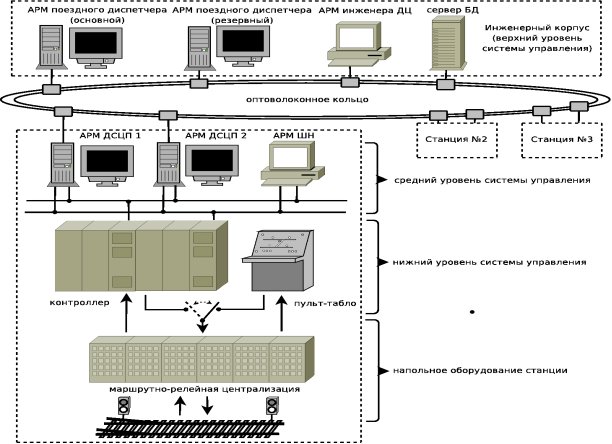
Структура системы
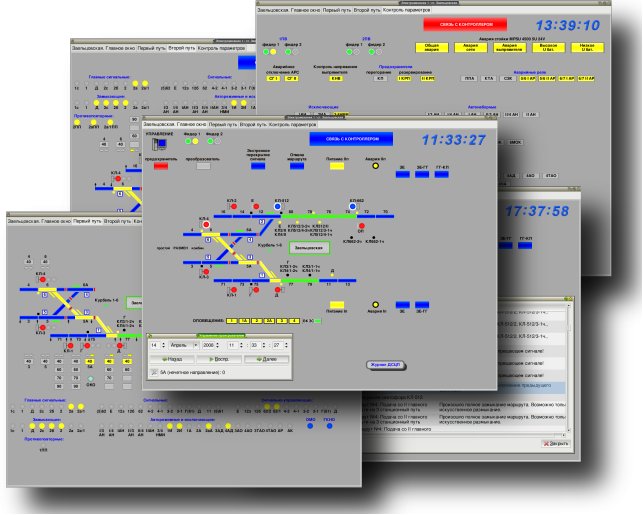
Примеры видеокадров
|
В рамках модернизации Новосибирского метрополитена создана автоматизированная система диспетчерского управления движением поездов, находящаяся в постоянной эксплуатации с 2005 года.
Предложены принципы построения интеллектуальных автоматизированных систем управления технологическими процессами для объектов повышенной опасности.
Разработаны средства проектирования систем управления, обладающих прозрачностью программного обеспечения, высокой надёжностью и живучестью, поддерживающих контроль и архивирование действий персонала, функции ассистента оператора, непрерывный мониторинг и диагностирование состояния объекта.
Разработана открытая модульная многоплатформенная SCADA-система, поддерживающая распределенное резервирование и предназначенная для создания многоуровневых программных комплексов повышенной надежности и безопасности.
23 марта 2012 года завершена модернизация автоматизированной системы диспетчерского управления движением поездов Новосибирского метрополитена.
|
|
ноу-хау:
Белоконь С.А., Котов К.Ю., Мальцев А.С., Соболев М.А. "Метод построения многоплатформенной открытой модульной SCADA-системы" .
Публикации
1. A.I. Abramov, S.A. Belokon’, R.R. Kogler, S.F. Markov, Yu.I. Micheev, V.M. Plotnikov, M.A. Sobolev, M.N. Filippov, V.V. Vasil’ev, A.P. Yan, Yu.N. Zolotukhin. Automated System of Supervisor Subway Traffic Control. In: Proc. of the Second IASTED International Multi-Conference «Automation, Control, and Applications (ACIT-ACA)», June 20-24, 2005, Novosibirsk, Russia, pp. 198-200.
2. Ю.Н. Золотухин, Р.Р. Коглер, Ю.И. Михеев. Микропроцессорная система управления движением поездов. // Метро и тоннели, 2005, 6. С. 10-11.
3. А.И. Абрамов, С.А. Белоконь, В.В. Васильев, Ю.Н. Золотухин, Р.Р. Коглер, С.Ф. Марков, Ю.И. Михеев, В.М. Плотников, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Модернизация системы диспетчерского управления движением поездов метрополитена. // Труды VIII Международной конференции "Проблемы управления и моделирования в сложных системах", (24 июня – 28 июня 2006 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2006. С. 269-273.
4. С.А. Белоконь, М.Н. Филиппов. Метод построения многоплатформенной открытой модульной SCADA–системы. // Вестник НГУ. Серия: Физика. 2008, том. 3, выпуск 1. С. 115-125.
5. PTA2009 доклад "Автоматизированная система диспетчерского управления (на примере управления движением поездов метрополитена)"
6. М.Н. Филиппов. Метод обработки неполных данных на основе трёхзначной логики. // Автометрия, 2009, 5. С. 124-131.
7. М.Н. Филиппов. Разработка и исследование моделей и методов построения автоматизированных систем диспетчерского управления. // Автореферат диссертации на соискание учёной степени кандидата технических наук. 2009. 18 с.
8. М.Н. Филиппов. Метод оценки надёжности программного обеспечения по информации, сохраняемой системой управления версиями. // Труды XII Международной конференции «Проблемы управления и моделирования в сложных системах» (21-23 июня 2010 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2010. С. 244-249.
9. S.A. Belokon, V.V. Vasilev, M.N. Filippov, A.P. Yan. Development and Testing of the Automated System of Supervisor Subway Traffic Control with the Use of the Relay-based Interlocking System Model. In: Proceedings of the IASTED Int. Conf. on Automation, Control, and Information Technology (ACIT 2010), June 15-18, 2010 in Novosibirsk, Russia. Acta Press Anaheim, Calgary, Zürich. pp. 241-244.
10. A.S. Maltsev, M.A. Sobolev, A.P. Yan. On the Question of Building an Open System of Automated Diagnostics for Novosibirsk Subway. In: Proceedings of the IASTED Int. Conf. on Automation, Control, and Information Technology (ACIT 2010), June 15-18, 2010 in Novosibirsk, Russia. Acta Press Anaheim, Calgary, Zürich. pp. 174-177.
11. Белоконь С.А., Васильев В.В., Золотухин Ю.Н., Мальцев А.С., Соболев М.А., Филиппов М.Н., Ян А.П. Автоматизированные системы диспетчерского управления (на примере управления движением поездов Новосибирского метрополитена) // В кн. Сборник трудов XII международной научно-практической конференции «Энергетическая безопасность России: новые подходы к развитию угольной промышленности», (г. Кемерово, Россия, 14–17 сентября 2010), 2010. С. 27–33.
12. С.А. Белоконь, В.В. Васильев, Ю.Н. Золотухин, А.С. Мальцев, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Автоматизированные системы диспетчерского управления объектами повышенной опасности // Автометрия. 2011, 3, С. 73-83.
13. С.А. Белоконь, В.В. Васильев, Ю.Н. Золотухин, А.С. Мальцев, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Распределенная автоматизированная система диспетчерского управления движением поездов Новосибирского метрополитена. // Труды Третьей российской конференции с международным участием "Технические и программные средства систем управления, контроля и измерения": труды и пленарные доклады участников конференции УКИ’12. - М.:ИПУ РАН, Москва, 16-19 апреля 2012, С. 101-107.
14. С.А. Белоконь, В.В. Васильев, Ю.Н. Золотухин, М.Н. Филиппов, А.П. Ян. Способы разработки распределенных автоматизированных систем диспетчерского управления повышенной надежности. // Труды Третьей российской конференции с международным участием "Технические и программные средства систем управления, контроля и измерения": труды и пленарные доклады участников конференции УКИ’12. - М.:ИПУ РАН, Москва, 16-19 апреля 2012, С. 291-300.
15. Belokon’ S.A., Filippov M.N., Vasil’ev V.V., Yan A.P., Zolotukhin Yu.N. Architecture of the Novosibirsk Subway Automated Traffic Control System. In: Proceedings of the 2013 IFAC International Conference on Intelligent Control and Automation Science September 2-4, 2013, Chengdu, China. С. 178-181 — 1 электрон. опт. диск.
16. Ю.Н. Золотухин, С.А. Белоконь, В.В. Васильев, М.Н. Филиппов, А.П. Ян. Автоматизированные системы диспетчерского управления движением поездов Новосибирского метрополитена. // В кн. Сборник тезисов докладов Всероссийской конференции «Индустриальные информационные системы» ИИС-2013. Новосибирск, 24-28 сентября 2013 г., С. 26-27.
17. Ю.Н. Золотухин, С.А. Белоконь, В.В. Васильев, М.Н. Филиппов, Ян А.П. Автоматизированная система диспетчерского управления движением поездов Новосибирского метрополитена: направление развития //Вычислительные технологии, том 18, Специальный выпуск, 2013, С. 156–162.
18. Золотухин Ю.Н., Филиппов М.Н. Автоматизация и жизнь // История науки и техники, 2017, №5, с. 88 – 93.
19. A. Gerasimova and A. Maltsev, "Universal Operator Interaction System with Control System Components for Experimental Equipment," 2024 8th International Conference on Information, Control, and Communication Technologies (ICCT), Vladikavkaz, Russian Federation, 2024, pp. 1-3, doi: 10.1109/ICCT62929.2024.10874885.
20. Герасимова А. П., Мальцев А.С. Архитектура программного обеспечения системы автоматизации экспериментальной станции «Быстропротекающие процессы» ЦКП «СКИФ» // Автометрия. 2025. Т. 61, №5. С.65-72. DOI 10.15372/AUT20250508.
|
|
Управление сложными электромеханическими процессами
|
|
|
Разработаны системы управления возбуждением синхронных генераторов и мощных синхронных двигателей. Нечёткие регуляторы, повышающие устойчивость системы энергоснабжения, защищены патентами РФ.
Для управления возбуждением мощных синхронных двигателей с целью подавления качаний ротора и поддержания заданного коэффициента мощности при колебаниях напряжения питающей сети и изменениях нагрузки предложен алгоритм нечеткого управления, основанный на оценивании внутреннего угла двигателя путем решения системы уравнений, описывающих поведение системы двигатель – система питания – нагрузка. Разработан метод управления возбуждением, основанный на применении скользящего режима с пограничным слоем и нечеткого управления. Предложен способ оценки внутреннего угла синхронного двигателя на основе измерений текущих значений напряжения питающей сети, активной и реактивной составляющих тока статора и тока возбуждения. Предложен метод повышения статической устойчивости двигателя за счет введения нелинейной обратной связи по углу.
Разработана обобщённая математическая модель q-фазной синхронной явнополюсной машины, возбуждаемой от постоянных магнитов, в виде набора из нескольких двух- и одной однофазной машин, что позволило эффективно моделировать совместную работу ветрогенератора с преобразователями типа «переменная скорость — постоянная частота» и разрабатывать системы управления процессами в многофазных машинах.
С использованием методов векторного и частотного управления предложена система управления моментом и скоростью асинхронного двигателя, обеспечивающая плавный пуск электропривода под нагрузкой и поддержание заданной скорости вращения.
Предложен метод идентификации параметров динамических объектов управления, основанный на минимизации квадратичного функционала, учитывающего невязки дифференциальных уравнений, описывающих объект, и предназначенный для использования в системах реального времени.
|
|
Публикации
1. В.Д. Бобко, Ю.Н. Золотухин, А.А. Нестеров. Нечеткая реализация скользящих режимов в системе возбуждения синхронного генератора. // Труды Международной конференции «Проблемы управления и моделирования в сложных системах» (15-17 июня 1999, Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 1999. С. 229-234.
2. Востриков А.С., Харитонов С.А., Золотухин Ю.Н., Нестеров А.А., Ян А.П., Канискин Н.А., Постников А.С., Симонов Б.Ф. Система тиристорного самовозбуждения гидро- и турбогенераторов. // Электротехника, 2000, № 11. С. 6-11.
3. Золотухин Ю.Н., Нестеров А.А. Об оценке фазовых углов при нечеткой стабилизации синхронного генератора. // IV Сибирский конгресс по прикладной и индустриальной математике, посвященный памяти М.А. Лаврентьева (1900-2000), (ИНПРИМ-2000). Тезисы докладов, ч. IV. Новосибирск, изд. Института математики СО РАН, 2000. С. 26.
4. Золотухин Ю.Н., Нестеров А.А., Ян А.П. Моделирование процессов в системах, содержащих синхронные генераторы. // Труды III Международной конференции «Проблемы управления и моделирования в сложных системах» (4-9 сентября 2001 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2001. С. 548-554.
5. Ю.Н. Золотухин, А.А. Нестеров, А.П. Ян. Нечеткий регулятор возбуждения синхронного генератора. // Труды V Международной конференции "Проблемы управления и моделирования в сложных системах", (17-22 июня 2003 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2003. С. 479-487.
6. Патент РФ № 2237346. Способ и устройство регулирования возбуждения синхронного генератора. Ю.Н. Золотухин, А.А. Нестеров и др. Официальный бюллетень Комитета РФ по патентам и товарным знакам № 27 от 27.09.2004 г. (введен в действие с 05.07.2002 г.).
7. A.A. Nesterov, Yu.N. Zolotukhin. Method of PMSM Field Parameters Identification in Torque Ripples Suppression System. In: Proc. of the Second IASTED International Multi-Conference «Automation, Control, and Applications (ACIT-ACA)», June 20-24, 2005, Novosibirsk, Russia, pp. 439-441.
8. Ю.Н. Золотухин, А.А. Нестеров. Идентификация параметров поля для подавления пульсаций момента синхронного двигателя с постоянными магнитами. // Автометрия, 2006, 2. С. 4-9.
9. А.И. Абрамов, С.А. Белоконь, Ю.Н. Золотухин, А.А. Нестеров, А.П. Ян. Использование скользящего режима в управлении возбуждением синхронного двигателя. // Автометрия, 2006, 2. С. 10-20.
10. Патент РФ на изобретение № 2289196. Устройство регулирования возбуждения синхронного двигателя. А.И. Абрамов, С.А. Белоконь, Ю.Н. Золотухин, А.А. Нестеров, А.П. Ян и др. Официальный бюллетень Комитета РФ по патентам и товарным знакам «Изобретения. Полезные модели», 2006, № 34. Опубликовано 10.12.2006 г.
11. Ю.Н. Золотухин, А.А. Нестеров. Модель 9-фазной синхронной машины с постоянными магнитами. // Труды X Международной конференции "Проблемы управления и моделирования в сложных системах", (23-25 июня 2008 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2008. С. 253-258.
12. К.Ю. Котов, О.Я. Шпилевая. Переключаемые системы: устойчивость и проектирование (обзор). // Автометрия, 2008, № 5. С. 71-87.
13. Ю.Н. Золотухин, А.С. Мальцев, А.А. Нестеров. Метод частотного управления асинхронным двигателем с векторной структурой потокосцеплений. // Автометрия, 2009, 5, С. 82-89.
14. Котов К.Ю., Мальцев А.С., Нестеров А.А., Соболев М.А., Филиппов М.Н., Ян А.П. Стенд для разработки и идентификации моделей сервоприводов. // В кн. Сборник тезисов докладов Всероссийской конференции «Индустриальные информационные системы» ИИС-2013. Новосибирск, 24-28 сентября 2013 г., С. 33-34.
15. К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Разработка и идентификация модели сервопривода на основе экспериментальных данных. // Автометрия, 2013, 6, С. 42-50.
16. К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Определение параметров сервопривода на основе экспериментальных данных. // Труды XVI Международной конференции "Проблемы управления и моделирования в сложных системах", (30 июня-03 июля 2014 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2014. С. 592-596.
|
|
Нечёткое управление и моделирование
Разработаны алгоритмы синтеза компьютерных моделей, реализующих существенную функциональную зависимость в классе нечетких композиций. Показано, что модели, основанные на композициях, реализуют в области определения непрерывные функции, если непрерывны нечеткие множества, используемые при фазификации. Разработан критерий связности подпространств непрерывных входов, порождаемых совокупностями дискретных входов, основанный на использовании структурных особенностей моделей, позволяющих использовать для этих целей критерии связности конечных графов.
Разработан класс нечетких D-моделей, синтез которых основан на дискретизации областей значений переменных; исследована возможность их использования для представления зависимостей между входными и выходным последовательностями динамических объектов, для локализации решений оптимизационных задач.
Разработаны системы нечёткого управления возбуждением синхронных генераторов и мощных синхронных двигателей.
Разработан способ нечеткого управления скоростью синхронного генератора при асинхронном пуске в двигательном режиме, предусматривающий одновременное воздействие на статорную обмотку и обмотку возбуждения и обеспечивающий заданные параметры движения.
Публикации
1. В.Я. Пивкин, Е.П. Бакулин, Д.И. Кореньков. Нечеткие множества в системах управления. Методическое пособие. Изд. НГУ, 1997.
2. В.Д. Бобко, Ю.Н. Золотухин, А.А. Нестеров. О нечеткой динамической коррекции параметров ПИД-регулятора. // Автометрия, 1998, 1. С. 50-55.
3. С.В. Жукова, Ю.Н. Золотухин. Оптимизация параметров регулятора с использованием нечетких оценок и генетического подхода. // Автометрия, 1998, 3. С. 56-61.
4. С.В. Жукова, Ю.Н. Золотухин, Л.А. Рахманова. Генетический подход и нечеткие оценки в оптимизации ПИД-регулятора.// «РОИ-98. Распределенная обработка информации. Труды 6 Международного семинара, (23-25 июня 1998, Новосибирск, Россия)». Новосибирск, Сибирское отделение РАН, 1998. С. 313-317.
5. В.Я. Пивкин. Построение нечетких моделей динамических объектов по данным наблюдений. // Автометрия, 1998, 3. С. 62-67.
6. В.Д. Бобко, Ю.Н. Золотухин, А.А. Нестеров. Оптимальная траектория как основа построения базы знаний нечеткого логического контроллера. // «РОИ-98. Распределенная обработка информации. Труды 6 Международного семинара, (23-25 июня 1998, Новосибирск, Россия)». Новосибирск, Сибирское отделение РАН, 1998. С. 290-294.
7. В.Я. Пивкин. Идентификация нечетких моделей динамических объектов по данным наблюдений с использованием дискретизации областей значений их параметров. // «РОИ-98. Распределенная обработка информации. Труды 6 Международного семинара, (23-25 июня 1998, Новосибирск, Россия)». Новосибирск, Сибирское отделение РАН, 1998. С. 328-332.
8. Е.П. Бакулин, В.Ф. Головин, Ю.Н. Золотухин, А.А. Нестеров, В.Н. Чайко, А.П. Ян. Нечеткое управление технологическим процессом обогащения угля методом отсадки. // «РОИ-98. Распределенная обработка информации. Труды 6 Международного семинара, (23-25 июня 1998, Новосибирск, Россия)». Новосибирск, Сибирское отделение РАН, 1998. С. 285-289.
9. Бакулин Е. П. Нечеткое управление на основе аппроксимации инверсной модели объекта. // Труды Международной конференции «Проблемы управления и моделирования в сложных системах», (15-17 июня 1999, Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 1999. С. 235-241.
10. В.Д. Бобко, Ю.Н. Золотухин, А.А. Нестеров. Нечеткая реализация скользящих режимов в системе возбуждения синхронного генератора. В кн. Труды Международной конференции «Проблемы управления и моделирования в сложных системах» (15-17 июня 1999, Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 1999. С. 229-234.
11. Пивкин В.Я. Нечеткие D-модели. Ч. 1. Структура, синтез, свойства, использование для локализации решений оптимизационных задач. // Автометрия, 2001, № 5. С. 103-116.
12. Пивкин В.Я. Нечеткие D-модели. Ч. 2. Самокорректировка в процессе эксплуатации объекта. Модели с дискретными параметрами. // Автометрия, 2001, № 6. С. 123-127.
13. Филиппов М.Н. Транслятор программ, составленных на языке нечеткого управления FCL (FUZZY CONTROL LANGUAGE). // Проблемы синтеза и проектирования систем автоматического управления. Материалы научно-практического семинара, (13-15 июня 2001 г., Новосибирск), изд. НГТУ, 2001. С. 83-86.
14. E.P. Bakulin, V.D. Bobko, A.A. Nesterov, V.Ya. Pivkin, M.N. Filippov, A.P. Yan, Yu.N. Zolotukhin, M.A. Zolotukhina. Fuzzy technology based combustion process optimization. In: Proc. of the IASTED. Int. Conf. Automation, Control, and Information Technology, June 10-13, 2002, Novosibirsk, Russia, pp. 167-169.
15. Е.П. Бакулин, В.Д. Бобко, Ю.Н. Золотухин, М.А. Золотухина, А.А. Нестеров, В.Я. Пивкин, М.И. Филиппов, А.П. Ян. Нечеткое управление подачей воздуха в топку парового котла. // Автометрия, 2002, 6. С. 36-44.
16. V. Ya. Pivkin. Syntezing and Correcting Fuzzy Model Rules via Series of Experiments. In: Proc. of the IASTED. Int. Conf. Automation, Control, and Information Technology, June 10-13, 2002, Novosibirsk, Russia, pp. 164-166.
17. Г.М. Шидло. Использование аппарата теории нечетких множеств для реализации алгоритма оценки обучаемого. // Материалы Международной научно-технической конференции «ИНФОРМАЦИОННЫЕ СИСТЕМЫ И ТЕХНОЛОГИИ», (22-25 апреля 2003 г., Новосибирск, Россия). Изд. НГТУ, Новосибирск, 2003. С. 79-84.
18. Ю.Н. Золотухин, А.А. Нестеров, А.П. Ян. Нечеткий регулятор возбуждения синхронного генератора. // Труды V Международной конференции "Проблемы управления и моделирования в сложных системах", (17-22 июня 2003 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2003. С. 479-487.
19. Ю.Н. Золотухин, А.В. Кущ. Об одном способе построения базы правил нечеткого контроллера. // Труды V Международной конференции "Проблемы управления и моделирования в сложных системах", (17-22 июня 2003 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2003. С. 473-478.
20. V.Ya. Pivkin. Fuzzy D-models: Localization of the Optimization Problem Solution in the Domain of Models. In: Proc. of the Second IASTED International Multi-Conference «Automation, Control, and Applications (ACIT-ACA)», June 20-24, 2005, Novosibirsk, Russia, pp. 454-458.
21. М.Н. Филиппов. Метод обработки неполных данных на основе трёхзначной логики. // Автометрия, 2009, 5. С. 124-131.
22. В.Я. Пивкин, И.В. Пивкина. Обработка экспериментальных данных с использованием дискретизации областей их значений. // Автометрия, 2010, 5, с. 132.
23. С.А. Белоконь, Ю.Н. Золотухин, М.Н.Филиппов. Нечёткая кластеризация в задачах определения аэродинамических характеристик и моделирования динамики летательного аппарата // Автометрия, 2018, Т.54, №5, С.99-107.
24. Золотухин Ю.Н., Котов К.Ю., Нестеров А.А., Семенюк Е.Д. Отслеживание объекта в видеопотоке с помощью сверточной нейронной сети // Автометрия. 2020. Т. 56, № 6. С. 100-106. DOI15372/AUT20200610.
Управление в робототехнических системах
|
|

Мобильный робот e-puck

Группа мобильных роботов e-puck
|

Квадрокоптер AR.Drone 2.0

Автономные мобильные роботы
|
|

Испытательный стенд
|
Решаемые задачи:
- траекторное управление;
- групповое управление;
- разработка алгоритмов локализации при движении в заранее неизвестной среде;
- планирование траектории движения при обходе препятствий.
Для управления подвижными объектами предложены принципы формирования управляющих параметров, обеспечивающих вынужденное движение по заданным траекториям или преследование объекта-цели с высоким качеством управления.
Для группы автономных объектов с выделенным лидером разработан робастный алгоритм отслеживания траектории цели, основанный на применении скользящего режима вдоль желаемой траектории в пространстве состояний.
|
|
Свидетельство о государственной регистрации программы для ЭВМ № 2016613926 "Программа траекторного управления полетом беспилотного летательного аппарата квадророторного типа", 2016 г.
Свидетельство о государственной регистрации программы для ЭВМ № 2018616183 "Программа управления полетом беспилотного летательного аппарата квадророторного типа со смещенным центром", 2018 г.
Публикации
1. Агеев М.Д., Бердышев В.И., Васильев С.Н., Киселев Л.В., Золотухин Ю.Н., Кунцевич В.М. и др. Проблемы создания интеллектуальных автономных подводных роботов и перспективы их решения на основе интеграции междисциплинарных научных исследований. // Оптимизация, управление, интеллект, № 2(10) , 2005. С. 6-22.
2. Ю.Н. Золотухин, Г.М. Шидло. Подходы к реализации модели интеллектуальной системы интерактивного обучения тактике общевойскового боя. // КИИ-2006. Труды десятой национальной конференции по искусственному интеллекту с международным участием, (25-28 сентября 2006 г., г. Обнинск, Россия), том 3, М., Физматлит, 2006. С. 1085-1091.
3. Ю.Н. Золотухин, Г.М. Шидло. Модель архитектуры интеллектуальной системы интерактивного обучения управлению общевойсковым подразделением. // Автометрия, 2006, 5. С. 83-97.
4. Ю.Н. Золотухин, К.Ю. Котов, А.А. Нестеров. Децентрализованное управление подвижными объектами в составе маневрирующей группы. // Автометрия, 2007, 3. С. 31-39.
5. Ю.Н. Золотухин, К.Ю. Котов, А.А. Нестеров. Управление автономным объектом при плоском движении по заданной траектории с обходом препятствий. // Труды IX Международной конференции "Проблемы управления и моделирования в сложных системах", (22-28 июня 2007 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2007. С. 213-219.
6. Ю.Н. Золотухин, А.А. Нестеров, А.П. Ян. Идентификация параметров динамической системы «автономный подводный аппарат – окружающая среда». // Автометрия, 2008, 5. С. 88-92.
7. Ю.Н. Золотухин, К.Ю. Котов, А.А. Нестеров, А.П. Ян. Управление плоским движением автономного объекта при исследовании скалярных полей. // Автометрия, 2008, № 6. С. 109-115.
8. Ю.Н. Золотухин, К.Ю. Котов, А.А. Нестеров. Управление группировкой подвижных объектов в задаче преследования. // Труды XI Международной конференции "Проблемы управления и моделирования в сложных системах", (22-24 июня 2009 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2009. С. 66-74.
9. Ю.Н. Золотухин, Г.М. Шидло. Принципы построения общевойсковых тактических тренажеров. // Сб. материалов 4 Всероссийской научно-практической конференции «Перспективные системы и задачи управления», (6-10 апреля 2009 г.), изд. Технологического института ЮФУ, Таганрог, 2009. С. 264-265.
10. К.Ю. Котов. Моделирование движения группировок динамических объектов и разработка алгоритмов децентрализованного управления объектами. // Автореферат диссертации на соискание учёной степени кандидата технических наук. 2009. 18 с.
11. Ю.Н. Золотухин, А.А. Нестеров. Управление перевёрнутым маятником с подвижной точкой подвеса. // Труды XII Международной конференции «Проблемы управления и моделирования в сложных системах» (21-23 июня 2010 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2010. С. 291-297.
12. Konstantin Yu. Kotov, Yuri N. Zolotukhin, A.A. Nesterov. Formation Control and Trajectory Tracking of Mobile Robots. In: Proceedings of the IASTED Int. Conf. on Automation, Control, and Information Technology (ACIT 2010), June 15-18, 2010 in Novosibirsk, Russia. Acta Press Anaheim, Calgary, Zürich. pp. 26-30.
13. Ю.Н. Золотухин, К.Ю. Котов, А.А. Нестеров. Управление мобильным роботом с дифференциальным приводом при параметрическом задании траектории движения. В кн. Материалы III Международной конференции "Инфокоммуникационные и вычислительные технологии и системы (ИКВТС-2010)", 6-11 сентября 2010 г., Улан-Удэ, Россия. Изд. Бурятского университета, 2010, с. 150-153.
14. Ю.Н. Золотухин, К.Ю. Котов, А.А. Нестеров, М.Н. Филиппов. Управление траекторным движением группы мобильных роботов: моделирование и эксперимент. В кн. Материалы X Международной конференции "Актуальные проблемы электронного приборостроения (АПЭП-2010)", 22-24 сентября 2010 г., Новосибирск, Россия. Изд. НГТУ, 2010, с. 101-106.
15. Ю.Н. Золотухин, А.А. Нестеров. Управление перевёрнутым маятником с учётом диссипации энергии.// Автометрия, 2010, 5, С. 3-11.
16. Ю.Н. Золотухин, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.Н. Филиппов, А.П. Ян. Коррекция транспортного запаздывания в системе управления мобильным роботом. // Автометрия, 2011, № 2. С. 46-57.
17. С.А. Белоконь, Ю.Н. Золотухин, А.А. Нестеров, М.Н. Филиппов. Управление квадрокоптером на основе организации движения по желаемой траектории в пространстве состояний. // Труды XIII Международной конференции "Проблемы управления и моделирования в сложных системах", (15-17 июня 2011 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2011. С. 217-222.
18. Ю.Н. Золотухин, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.Н. Филиппов. Компенсация транспортного запаздывания при управлении траекторным движением группы мобильных объектов. // Труды XIII Международной конференции "Проблемы управления и моделирования в сложных системах", (15-17 июня 2011 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2011. С. 223-229.
19. К.Ю. Котов, А.С. Мальцев, М.А. Соболев, М.Н. Филиппов. Совместное использование одометрии и системы технического зрения для оценки координат мобильного робота. // Труды XIII Международной конференции "Проблемы управления и моделирования в сложных системах", (15-17 июня 2011 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2011. С. 230-236.
20. К.Ю. Котов, А.С. Мальцев, М.А. Соболев, М.Н. Филиппов. Использование локальной системы навигации и системы технического зрения для оценки координат мобильного робота. // Труды Третьей российской конференции с международным участием "Технические и программные средства систем управления, контроля и измерения": труды и пленарные доклады участников конференции УКИ’12. - М.:ИПУ РАН, Москва, 16-19 апреля 2012, С. 1114-1121.
21. К.Ю. Котов, А.С. Мальцев, М.А. Соболев. Метод решения задачи одновременной локализации и построения карты при движении автономного мобильного робота. // Труды Третьей российской конференции с международным участием "Технические и программные средства систем управления, контроля и измерения": труды и пленарные доклады участников конференции УКИ’12. - М.:ИПУ РАН, Москва, 16-19 апреля 2012, С. 1281-1287.
22. С.А. Белоконь, Ю.Н. Золотухин, А.С. Мальцев, А.А. Нестеров, М.Н. Филиппов, А.П. Ян. Управление параметрами полёта квадрокоптера при движении по заданной траектории. // Автометрия, 2012, 5, С. 32-42.
23. С.А. Белоконь, Ю.Н. Золотухин, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, В.Я. Пивкин, М.А Соболев, М.Н. Филиппов, А.П. Ян. Использование фильтра Калмана в системе управления траекторным движением квадрокоптера. // Автометрия, 2013, 6, С. 14-24.
24. С.А. Белоконь, Ю.Н. Золотухин, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Управление квадрокоптером AR.DRONE при движении по заданной траектории. В кн. Труды XV Международной конференции "Проблемы управления и моделирования в сложных системах", (25-28 июня 2013, г. Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2013, с. 506-514.
25. С.Г. Деришев, Ю.Н. Золотухин, К.Ю. Котов, А.А. Нестеров, М.А. Соболев, Н.П. Сохи, М.Н. Филиппов. О расчете углов ориентации летательного аппарата вертикального взлета и посадки. В кн. Труды XV Международной конференции "Проблемы управления и моделирования в сложных системах", (25-28 июня 2013, г. Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2013, с. 515-522.
26. Konstantin Yu. Kotov, Alexandr S. Maltsev, Maxim A. Sobolev. Recurrent neural network and extended Kalman filter in SLAM problem. In: Proceedings of the 2013 IFAC International Conference on Intelligent Control and Automation Science September 2-4, 2013, Chengdu, China. С. 197-200 — 1 электрон. опт. диск.
27. К.Ю. Котов, А.С. Мальцев, М.А. Соболев. Траекторное управление автономной мобильной платформой для экологического мониторинга, аэрофотосъемки и исследования наземных объектов с воздуха. // В кн. Сборник тезисов докладов Всероссийской конференции «Индустриальные информационные системы» ИИС-2013. Новосибирск, 24-28 сентября 2013 г., С. 34-35.
28. C.А. Белоконь, Ю.Н. Золотухин, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Управление квадрокоптером AR.DRONE при движении по заданной траектории с обходом препятствий. // Труды XVI Международной конференции "Проблемы управления и моделирования в сложных системах", (30 июня-03 июля 2014 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2014. С. 535-539.
29. C.А. Белоконь, Ю.Н. Золотухин, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Управление полетом квадрокоптера при параметрическом задании траектории движения. // В сборнике: XII Всероссийское совещание по проблемам управления ВСПУ-2014. Москва, Институт проблем управления им. В.А. Трапезникова РАН, 2014. С. 3384-3390.
30. Yu. N. Zolotukhin, K. Yu. Kotov, A. S. Maltsev, A. A. Nesterov, M. A. Sobolev and M. N. Filippov. A Relative Measurement based Leader-follower Formation Control of Mobile Robots. In: Proceedings of the ICINCO 2015 12th International Conference on Informatics in Control, Automation and Robotics. Volume 2. 21-23 July, 2015. Colmar, Alsace, France. pp. 310-313.
31. Ю.Н. Золотухин, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, В.Я. Пивкин, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Робастное управление подвижными объектами в группе лидер-ведомые с использованием метода структурного синтеза. // Автометрия. 2015, 5. С. 82-91.
32. Ю.Н. Золотухин, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.А. Соболев, А.Е. Цупа. Координированное управление группой роботов в задачах перемещения груза. // Вычислительные технологии, том 21, №1, 2016, С. 70–79.
33. С.А. Белоконь, Ю.Н. Золотухин, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.А. Соболев, М.Н. Филиппов, А.П. Ян. Управление мобильными роботами в составе группы лидер—ведомые. // Мехатроника, Автоматизация, Управление. 2016, 17, 3, С.166-172.
34. К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.А. Соболев, А.П. Ян. Управление квадрокоптерами в составе группы лидер-ведомые. // Труды XVIII Международной конференции "Проблемы управления и моделирования в сложных системах", (20-25 сентября 2016 г., Самара, Россия). Самара: ООО "Офорт", 2016. С. 406-409.
35. К.Ю. Котов, А.М. Милованова, Е.Д. Семенюк, М.А. Соболев. Автоматизированная система управления полетом параплана. // Труды XVIII Международной конференции "Проблемы управления и моделирования в сложных системах", (20-25 сентября 2016 г., Самара, Россия). Самара: ООО "Офорт", 2016. С. 410-414.
36. А.С. Мальцев, А.Е. Цупа. Многоконтурная адаптивная система управления группировкой транспортных роботов. // Труды XVIII Международной конференции "Проблемы управления и моделирования в сложных системах", (20-25 сентября 2016 г., Самара, Россия). - Самара: Изд. Самарский научный центр РАН, 2016. С. 415-420.
37. К.В. Канина, А.С. Мальцев, А.Е. Цупа. Создание экспериментальных роботов и алгоритмов управления в условиях возмущений // Труды XIX Международной конференции "Проблемы управления и моделирования в сложных системах", (12-15 сентября 2017 г., Самара, Россия). Самара: ООО "Офорт", 2017. С. 135-140.
38. К.Ю. Котов, А.М. Свитова, Е.Д. Семенюк, М.А. Соболев. Структурный синтез системы автоматического управления полетом параплана // Труды XIX Международной конференции "Проблемы управления и моделирования в сложных системах", (12-15 сентября 2017 г., Самара, Россия). Самара: ООО "Офорт", 2017. С. 141-145.
39. К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.А. Соболев, А.П. Ян. Децентрализованное управление квадрокоптерами в составе группы лидер-ведомые // Автометрия, 2017, Т.53, № 1, С. 26-31.
40. К.Ю. Котов, А.А. Нестеров, М.Н. Филиппов, А.П. Ян. Метод управления полетом квадрокоптера в задаче сопровождения цели // Автометрия, 2017, Т.53, № 4, С. 3-10.
41. Мальцев А.С., Мамонова К.Е., Щекочихин Т.П. Построение систем управления роботизированными устройствами с использованием веб-технологий и ROS // Молодежь. Техника. Космос: труды X Общероссийской молодежной науч.-техн. конф. Т.2, (18 – 20 апреля 2018 года, Санкт-Петербург, Россия),(Библиотека журнала «Военмех. Вестник БГТУ», № 50) / Балт. гос. техн. ун-т. – СПб.; 2018. С.116–120.
42. А.С. Димова. Управление траекторным движением квадрокоптера при транспортировке груза на подвесе // Материалы XIV Международной научной конференции "Устойчивость и колебания нелинейных систем управления" (конференция Пятницкого), 30 мая-1 июня 2018 г., Москва, Россия). Москва: ИПУ РАН, 2018 г. С. 134-137.
43. Ю.Н. Золотухин, К.Ю. Котов, А.М. Свитова, М.А. Соболев. Идентификация динамики движения квадрокоптера // Материалы XIV Международной научной конференции "Устойчивость и колебания нелинейных систем управления" (конференция Пятницкого), 30 мая-1 июня 2018 г., Москва, Россия). Москва: ИПУ РАН, 2018 г. С. 170-173.
44. К.Ю. Котов, Р.Ю. Епифанов. Разработка экстремальной системы поддержания требуемой высоты полета параплана // Материалы XIV Международной научной конференции "Устойчивость и колебания нелинейных систем управления" (конференция Пятницкого), 30 мая-1 июня 2018 г., Москва, Россия). Москва: ИПУ РАН, 2018 г. С. 226-229.
45. В.В. Попеленков, К.Ю. Котов, А.С. Мальцев. Разработка алгоритма управления траекторным движением группы мобильных роботов // Труды XX Международной конференции "Проблемы управления и моделирования в сложных системах", (3-6 сентября 2018 г., Самара, Россия). Самара: ООО "Офорт", 2018. С. 206-211.
46. А.С. Димова, К.Ю. Котов, А.С. Мальцев, А.А. Нестеров, М.Н. Филиппов. Управление квадрокоптером в задаче транспортировки груза на подвесе // Автометрия, 2018, Т.54, №5, С. 116-121.
47. Ю.Н. Золотухин, К.Ю. Котов, А.М. Свитова, Е.Д. Семенюк, М.А. Соболев. Идентификация динамики подвижного объекта с помощью нейронных сетей // Автометрия, 2018, Т.54, №6, С. 107-113.
48. А.С. Димова, К.Ю. Котов, Е.Д. Семенюк, М.А. Соболев. Управление полётом параплана в режиме преследования цели. // XIII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2019: ТРУДЫ [Электронный ресурс] 17-20 июня 2019 г., Москва / Под общ. ред. Д.А. Новикова. С. 285-289.
49. А. С. Димова, К. Ю. Котов, А. С. Мальцев, Е. Д. Семенюк, М. А. Соболев. Управление траекторным движением квадрокоптера при транспортировке груза на подвесе: эксперимент // Вестник НГУ. Серия: Информационные технологии, 2019, Выпуск 4, Том 17, C.46-56.
50. Ю.Н. Золотухин, А.С. Мальцев, М.Н. Филиппов, К.Ю. Котов, А.С. Димова. Адаптивное управление движением группы роботов по заданной траектории // Автометрия, 2019, Т.55, №6, С.3-10.
51. Котов К.Ю., Мальцев А.С., Нестеров А.А., Ян А.П. Алгоритмы и архитектура системы управления траекторным движением мультироторного летательного аппарата // Автометрия. 2020. Т. 56, № 3. С. 20-28. DOI15372/AUT20200303.
52. Липовый Д. А., Мальцев А. С. Разработка архитектуры полетного контроллера для квадрокоптера на базе одноплатного компьютера Raspberry Pi // Вестник НГУ. Серия: Информационные технологии. 2020. Т. 18, № 3. С. 19–33. DOI: 10.25205/1818-7900-2020-18-3-19-33.
53 .Dimova A. S., Kotov K.Yu., Maltsev A. S. Trajectory control of a quadrotor carrying a cable-suspended load // 2020 24th International Conference on System Theory, Control and Computing (ICSTCC), October 8-10, 2020, Sinaia, Romania, P. 501-505.
54. К. Ю. Котов, А. С. Мальцев , Е. Е. Пришляк, М. А. Соболев. Комплекс группового управления беспилотными аппаратами. // Вычислительные технологии. 2021. Т.26, №1. С. 99-111. DOI:10.25743/ICT.2021.26.1.008
55. Е. Е. Пришляк. Система управления совместными действиями беспилотных аппаратов // Материалы 59-й Международной научной студенческой конференции 12–23 апреля 2021: Информационные технологии. Новосибирск : ИПЦ НГУ, 2021. C. 42
56. Е.Е. Пришляк. Управление совместным движением колесного робота и беспилотного летательного аппарата // XIV Всероссийская мультиконференция по проблемам управления (МКПУ-2021): материалы XIV мультиконференции (Дивноморское, Геленджик, 27 сентября – 2 октября 2021 г.): в 4 т. / Южный федеральный университет – Ростов-на-Дону; Таганрог: Издательство Южного федерального университета, 2021. T. 1. C. 104-106.
57. Kotov K.Yu., Prishlyak E.E., Sobolev M.A., Maltsev A.S. Research complex for unmanned autonomous vehicles control systems // 2021 IEEE 15 th INTERNATIONAL CONFERENCE OF ACTUAL PROBLEMS OF ELECTRONIC INSTRUMENT ENGINEERING (APEIE), 19-21 November 2021, NSTU, Novosibirsk, Russia. C. 422-425.
58. Пришляк Е. Е. Система управления движением беспилотных аппаратов по программной траектории. // Информационные технологии. Научный инжиниринг: Материалы 61-й Междунар. науч. студ. конф. 17–26 апреля 2023 г. / Новосиб. гос. ун-т. —Новосибирск : ИПЦ НГУ, 2023. — 276 с. С. 73. DOI 10.25205/978-5-4437-1437-0.
59. Пришляк Е.Е., Мальцев А.С. Управление движением разнородных беспилотных аппаратов с автоматической настройкой параметров // XVI Международная молодежная научно-техническая конференция «Молодежь. Техника. Космос» (25 - 29 марта 2024, Санкт-Петербург, Россия). 2024. T3. C. 35-38.
60. Белоконь С.А., Герасимова А. П., Золотухин Ю.Н., К.Ю., Мальцев А.С. Управление боковым движением летательного аппарата на основе полной энергии // Автометрия. 2025. Т. 61, №3. С.1-12. DOI 10.15372/AUT20250306.
|
|
|
")
")