Research Results 09
Control of autonomous mobile vehicles formations
|
|


Mobile robot e-puck
|

Quadrocopter AR.Drone 2.0

Autonomous mobile robots
|
|

Bench tester
|
For the control of mobile vehicles in path following or trajectory tracking tasks an approach to forming of control parameters is proposed. It provides robustness and high quality of control.
A control scheme for mobile robot formation in the leader following mode is proposed. It enables to track the target and is based on using a sliding mode along the desired trajectory in the state space. The uniformity of the system structure is maintained for all members of the group that provides their replacement in case of a breakdown.
We have proposed an algorithm for control of an autonomous vehicle with one environment sensor. The algorithm ensures vehicle displacement toward the isoline and further movement along the isoline of a scalar field. It is based on using a local estimate of the scalar field gradient. An additional test signal used in the system enables the vehicle to calculate the total gradient value.
|
|
Publications
1. Yu.N. Zolotukhin, K.Yu. Kotov, A.A. Nesterov. Decentralized control of mobile robots in formation, Optoelectronics Instrumentation and Data Processing, Vol.43, Iss.3, pp.218, 2007.
2. Yu.N. Zolotukhin, K.Yu. Kotov, A.A. Nesterov. Autonomous vehicle control in planar movement along the target trajectory with obstacle avoidance. (In Russian) // Proceedings Of The IX International Conference ''Complex systems: control and modeling problems'', 22-28 june, 2007, pp. 213-219, Samara, Russia.
3. Yu.N. Zolotukhin, A. A. Nesterov, A.P. Yan. Identifying the parameters of a dynamic autonomous undersea vehicle — environment system, Optoelectronics Instrumentation and Data Processing, Vol.44, Iss.5, pp.450-453, 2008.
4. Yu.N. Zolotukhin, K.Yu. Kotov, A.A. Nesterov and A. P. Yan. Autonomous object planar movement control in investigating scalar fields, Optoelectronics Instrumentation and Data Processing, Vol.44, Iss.6, pp.562-566, 2008.
5. Yu.N. Zolotukhin, K.Yu. Kotov, A.A. Nesterov. Control of mobile vehicles formation in pursuit problem. (In Russian) // Proceedings Of The XI International Conference ''Complex systems: control and modeling problems'', 22-24 june, 2009, pp. 66-74, Samara, Russia.
6. Yu.N. Zolotukhin, A.A. Nesterov. Inverted pendulum control with allowance for energy dissipation, Optoelectronics Instrumentation and Data Processing, Vol.46, Iss.5, pp.401-407, 2010.
7. Konstantin Yu. Kotov, Yuri N. Zolotukhin, A.A. Nesterov. Formation Control and Trajectory Tracking of Mobile Robots. In: Proceedings of the IASTED Int. Conf. on Automation, Control, and Information Technology (ACIT 2010), June 15-18, 2010 in Novosibirsk, Russia. Acta Press Anaheim, Calgary, Zürich. pp. 26-30.
8. Yu.N. Zolotukhin, K.Yu. Kotov, A.S. Maltsev, A.A. Nesterov, M.N. Filippov and A.P. Yan. Correction of transportation lag in the mobile robot control system, Optoelectronics Instrumentation and Data Processing, Vol.47, Iss.2, pp.141-150, 2011.
9. Yu.N. Zolotukhin, K.Yu. Kotov, A.S. Maltsev and A.A. Nesterov and M.N. Filippov. Transport delay compensation in trajectory tracking control of mobile robots formation.(In Russian) // Proceedings Of The XIII International Conference ''Complex systems: control and modeling problems'', 15-17 june, 2011, pp. 223-229, Samara, Russia.
10. K.Yu. Kotov, A.S. Maltsev, M.A. Sobolev and M.N. Filippov. Combining odometry and visual system in position estimation for a mobile robot.(In Russian) // Proceedings Of The XIII International Conference ''Complex systems: control and modeling problems'', 15-17 june, 2011, pp. 230-236, Samara, Russia.
11. S.A. Belokon, Yu.N. Zolotukhin, A. A. Nesterov and M.N. Filippov. Quadrocopter control based on organization of a forced motion along the desired trajectory in the system state space. (In Russian) // Proceedings Of The XIII International Conference ''Complex systems: control and modeling problems'', 15-17 june, 2011, pp. 217-222, Samara, Russia.
12. Konstantin Yu. Kotov, Alexandr S. Maltsev, Maxim A. Sobolev. Recurrent neural network and extended Kalman filter in SLAM problem. In: Proceedings of the 2013 IFAC International Conference on Intelligent Control and Automation Science September 2-4, 2013, Chengdu, China. С. 197-200.
13. Yu. N. Zolotukhin, K. Yu. Kotov, A. S. Maltsev, A. A. Nesterov, M. A. Sobolev and M. N. Filippov. A Relative Measurement based Leader-follower Formation Control of Mobile Robots. In: Proceedings of the ICINCO 2015 12th International Conference on Informatics in Control, Automation and Robotics. Volume 2. 21-23 July, 2015. Colmar, Alsace, France. pp. 310-313.
14. Kotov K.Yu., Prishlyak E.E., Sobolev M.A., Maltsev A.S. Research complex for unmanned autonomous vehicles control systems // 2021 IEEE 15 th INTERNATIONAL CONFERENCE OF ACTUAL PROBLEMS OF ELECTRONIC INSTRUMENT ENGINEERING (APEIE), 19-21 November 2021, NSTU, Novosibirsk, Russia. C. 422-425.
|
|
Fuzzy control and modelling
|
|
|
|
|
Publications
1. E.P. Bakulin, V.D. Bobko, A.A. Nesterov, V.Ya. Pivkin, M.N. Filippov, A.P. Yan, Yu.N. Zolotukhin, M.A. Zolotukhina. Fuzzy technology based combustion process optimization. In: Proc. of the IASTED. Int. Conf. Automation, Control, and Information Technology, June 10-13, 2002, Novosibirsk, Russia, pp. 167-169.
2. V. Ya. Pivkin. Syntezing and Correcting Fuzzy Model Rules via Series of Experiments. In: Proc. of the IASTED. Int. Conf. Automation, Control, and Information Technology, June 10-13, 2002, Novosibirsk, Russia, pp. 164-166.
3. V.Ya. Pivkin. Fuzzy D-models: Localization of the Optimization Problem Solution in the Domain of Models. In: Proc. of the Second IASTED International Multi-Conference «Automation, Control, and Applications (ACIT-ACA)», June 20-24, 2005, Novosibirsk, Russia, pp. 454-458.
4. M.N. Filippov. Processing of incomplete data with the use of ternary logic, Optoelectronics Instrumentation and Data Processing, Vol.45, Iss.5, pp.481-486, 2009.
|
|
Supervisory control and decision making system
|
|
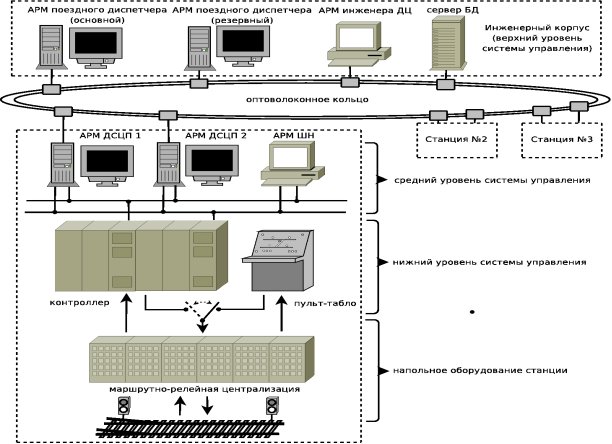
Structure of the system
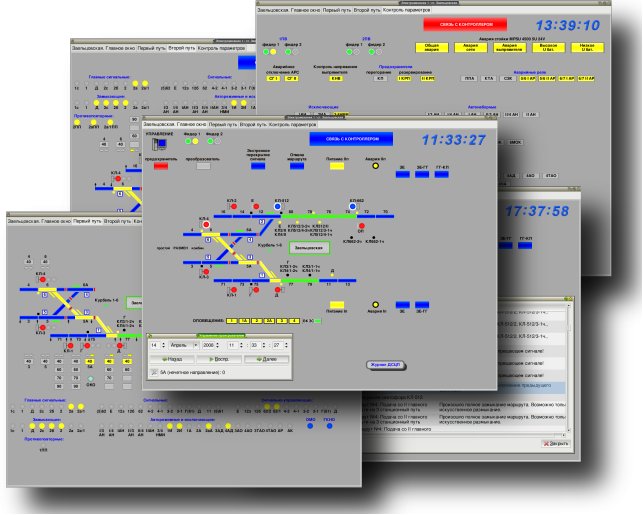
The snapshots of the system's workstation
|
The principles of building of intelligent automated process control systems for high-risk locations are proposed.
The open modular multi-platform SCADA system supporting distributed reserving and designed for implementing multilevel software with increased reliability and security is developed.
The automated traffic control system designed under the modernization of the Novosibirsk subway is in continuous operation since 2005.
|
|
Publications
1. A.I. Abramov, S.A. Belokon’, R.R. Kogler, S.F. Markov, Yu.I. Micheev, V.M. Plotnikov, M.A. Sobolev, M.N. Filippov, V.V. Vasil’ev, A.P. Yan, Yu.N. Zolotukhin. Automated System of Supervisor Subway Traffic Control. In: Proc. of the Second IASTED International Multi-Conference «Automation, Control, and Applications (ACIT-ACA)», June 20-24, 2005, Novosibirsk, Russia, pp. 198-200.
2. M.N. Filippov. Processing of incomplete data with the use of ternary logic, Optoelectronics Instrumentation and Data Processing, Vol.45, Iss.5, pp.481-486, 2009.
3. S.A. Belokon, V.V. Vasilev, M.N. Filippov, A.P. Yan. Development and Testing of the Automated System of Supervisor Subway Traffic Control with the Use of the Relay-based Interlocking System Model. In: Proceedings of the IASTED Int. Conf. on Automation, Control, and Information Technology (ACIT 2010), June 15-18, 2010 in Novosibirsk, Russia. Acta Press Anaheim, Calgary, Zürich. pp. 241-244.
4. A.S. Maltsev, M.A. Sobolev, A.P. Yan. On the Question of Building an Open System of Automated Diagnostics for Novosibirsk Subway. In: Proceedings of the IASTED Int. Conf. on Automation, Control, and Information Technology (ACIT 2010), June 15-18, 2010 in Novosibirsk, Russia. Acta Press Anaheim, Calgary, Zürich. pp. 174-177.
5. Belokon' S.A., Filippov M.N., Vasil'ev V.V., Yan A.P., Zolotukhin Yu.N. Architecture of the Novosibirsk Subway Automated Traffic Control System. In: Proceedings of the 2013 IFAC International Conference on Intelligent Control and Automation Science September 2-4, 2013, Chengdu, China. С. 178-181.
6. A. Gerasimova and A. Maltsev, "Universal Operator Interaction System with Control System Components for Experimental Equipment," 2024 8th International Conference on Information, Control, and Communication Technologies (ICCT), Vladikavkaz, Russian Federation, 2024, pp. 1-3, doi: 10.1109/ICCT62929.2024.10874885.
|
|
Control of complex electromechanical processes
|
|
|
|
|
Publications
1. A.A. Nesterov, Yu.N. Zolotukhin. Method of PMSM Field Parameters Identification in Torque Ripples Suppression System. In: Proc. of the Second IASTED International Multi-Conference «Automation, Control, and Applications (ACIT-ACA)», June 20-24, 2005, Novosibirsk, Russia, pp. 439-441.
2. O.Ya. Shpilevaya, K.Yu. Kotov. Switched systems: Stability and design (review), Optoelectronics Instrumentation and Data Processing, Vol.44, Iss.5, pp.439-449, 2008.
3. Yu.N. Zolotukhin, A.S. Mal’tsev, A.A. Nesterov. Method of frequency control of an induction motor with a vector structure of flux linkages, Optoelectronics Instrumentation and Data Processing, Vol.45, Iss.5, pp.447-453, 2009.
|
|
|

")
")