")
")
Research Results 162013 г.Для управления Большим солнечным вакуумным телескопом разработана автоматизированная система, имеющая распределенную архитектуру, основанная на АРМ контроллерах подключаемых по каналам Ethernet к компьютеру астронома - оператора. Такой выбор обусловлен следующими особенностями:
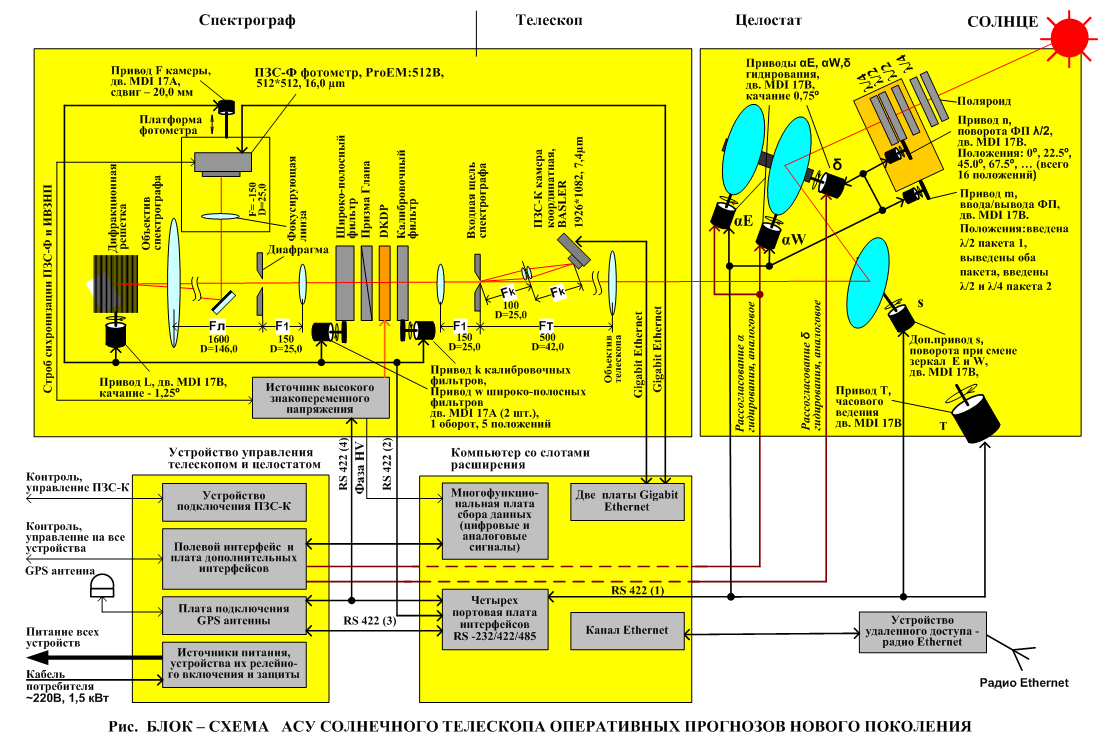
Контроллеры обеспечивают управление двигателями и другими исполнительными устройствами подсистем в соответствии с алгоритмом текущего эксперимента наблюдений Солнца. В составе АСУ имеются видеокамеры и мобильный пульт управления – переносной компьютер с каналом Wi-FI. Предложен метод построения системы контроля погрешности формирования прецизионных углоизмерительных структур датчиков, входящих в состав систем управления позиционированием главных зеркал комплексов наблюдения за космическим пространством. Прецизионные датчики угла поворота, входящие в состав систем управления позиционированием главных зеркал оптических комплексов наблюдения космического пространства не имеют собственной подшипниковой системы и размещаются непосредственно на осях, угол поворота которых они должны контролировать. Эта особенность используемых датчиков определяет специфические пути построения систем контроля геометрии их кодирующих узлов, причём в идеале эти системы должны обеспечить контроль структур с погрешностью не хуже ± 0,05". Для достижения поставленной цели предложено использовать дифференциальный принцип измерения характеристик контролируемых углоизмерительных структур (патент РФ № 83133), суть которого состоит в том, что с помощью прецизионного референтного углового датчика производится одновременное измерение погрешности положения элементов топологии двух других структур, из которых одна является контролируемой структурой, а вторая – рабочей. При этом предполагается, что паспортные характеристики рабочей структуры должны быть известны с необходимой точностью. 2010-2012 гг.В лаб. 16 ИАиЭ СО РАН разработан аппаратно-программный комплекс автоматизированного управления тремя солнечными телескопами оперативных прогнозов нового поколения (СТОП 1-3) созданными ИСЗФ СО РАН и предназначенными для получения экспериментальных данных о крупномасштабных магнитных полях (КМП) Солнца. Аппаратная часть системы управления телескопа обеспечивает непосредственный доступ к контролю и управлению устройствами телескопа: шаговыми двигателями приводов, высоковольтным источником, ТВ камерами подсистем гидирования и получения спектра. Инструментальное и прикладное программное обеспечение телескопов СТОП 1-3 разработано с использованием кросс - платформенного инструментария QT (http://qt.nokia.com/). Прикладная часть ПО с помощью графического интерфейса оператора (ГИО) позволяет отображать состояние узлов телескопа, показывать изображение спектра и видимое изображение солнца, формировать задание программе сканирования диска Солнца. Подсистема слежения обеспечивает перемещение изображения солнечного диска относительно входной щели спектрографа и удерживание его во время измерения. Установка поляризационных фильтров, калибровочных пластин производится также с использованием ГИО. Реализовано программное обеспечение автоматической настройки и калибровки аппаратуры телескопа, в том числе: фокусировки камеры спектрографа, определения текущего значения полуволнового напряжения оптического модулятора и текущего (суточного) угла направления сканирования (положение оптической щели спектрографа) относительно оси вращения Солнца. Обеспечено автоматическое сканирование диска Солнца с заданным растром, что позволило получать данные для расчета магнитограммы Солнца. Типовой шаг сканирования около 30'', время получения данных полной магнитограммы Солнца -15 минут.
Сотрудники лаб. К.И. Будников, А.А. Лубков, С.А. Лылов за настройкой СТОП 1
Целостат телескопа СТОП 1, Байкальская астрофизическая обсерватория (поселок Листвянка)
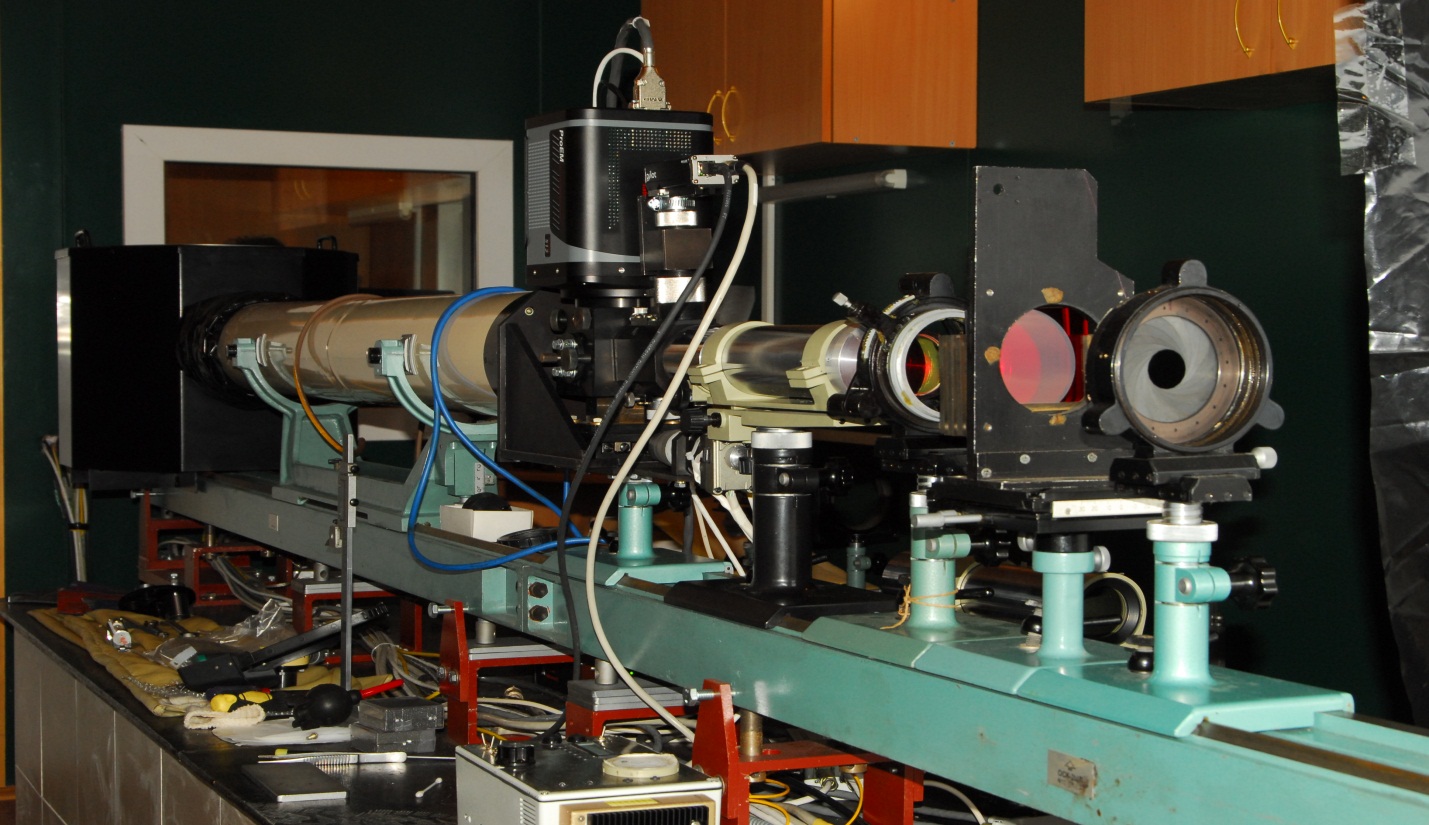
Оптическая скамья телескопа СТОП 1 |
|
Institute of Automation and Electrometry of the Siberian Branch of the Russian Academy of Sciences |
 |
-
Home

-
Labs Pages
-
Laboratory 16
-
Research Results 16
- 2010-2012 гг.


|
|