2025
Для перспективной модели КИДУ разработан блок фотоприемника на основе Si-ФЭУ PM3347 фирмы KETEK (рисунок 1). Размер активной области – 3 × 3 мм2, шаг ячеек – 47 мкм, количество ячеек – 4096, рекомендованное напряжение питания – 30-35 В.

Рис. 1 – Внешний вид разработанных узлов
На рисунках 2,а и 2,б представлены результаты контроля лимба фирмы Heidenhain (Германия) имеющего 36000 штрихов (линейный размер штриха – 5 мкм). На рисунке 2,а измерение выполнялось с помощью фотоприёмного узла на основе фотодиодов и щели, шириной 220 мкм, что с учётом коэффициента увеличения в измерительном канале КИДУ АЭ.1686 эквивалентно ширине 8.8 мкм в плоскости тестируемого растра. На рисунке 2,б – с помощью блока на основе Si-ФЭУ модели PM3347 и щелью 55 мкм. Для КИДУ АЭ.1686 это эквивалентно ширине 2.2 мкм в плоскости тестируемого лимба.
|
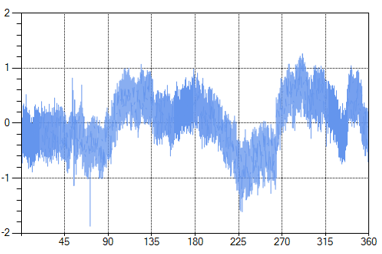
а) Фотодиоды и щель 220 мкм (8,8 мкм)
|
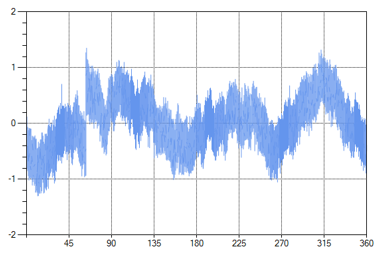
б) Si-ФЭУ и щель 55 мкм (2,2 мкм)
|
|
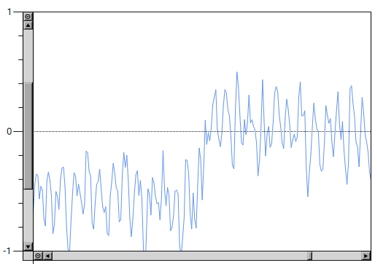
в) Диагностика «разрыва» на кривой погрешности с помощью фотодиода и щели 220 мкм
|
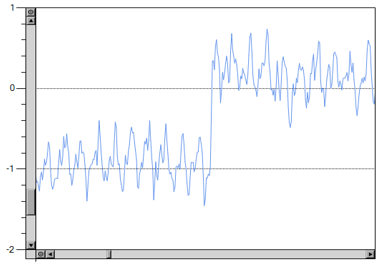
г) Диагностика «разрыва» на кривой погрешности с помощью Si-ФЭУ и щели 55 мкм
|
Рис. 2 – Контроль точности изготовления лимба Heidenhain 36000 штрихов (линейный размер штриха – 5 мкм)
На рисунках 2,в и 2,г представлены результаты диагностики «разрыва» на кривой погрешности измерительного растра. Данный разрыв присущ технологии Diadur, применяемой фирмой Heidenhain при производстве измерительных растров.
2023
Разработан автоматизированный программно-аппаратный комплекс, предназначенный для контроля точности изготовления и диагностики повреждений фотошаблонов и рабочих образцов оптических угломерных структур, используемых в отсчётных системах устройств гониометрического типа (оптоэлектронных датчиках угла поворота, поворотных столах, тахеометрах и т.д.). Впервые в РФ выполнен с неопределённостью ±0,5ʺ метрологический контроль погрешности изготовления нерегулярных структур на основе псевдослучайных шкал (Bar-код).
Комплекс позволяет сократить производственные расходы за счет организации полного входного контроля характеристик оптических элементов, являющихся основным метрологическим элементом в измерительном оборудовании, выпускаемом предприятиями оптико-механической промышленности.
Аналогов в РФ нет. Технические решения в части конструкции комплекса, метода измерений, калибровки угловых датчиков защищены патентами РФ. Результаты исследований использовались при выполнении работ в интересах АО «ПО Уральский оптико-механический завод» (г. Екатеринбург).

Рис. 1 Внешний вид комплекса
")
Рис. 2 Результат измерения и диагностики псевдослучайных шкал (Bar-код)
2022
Разработка метода снижения неопределённости калибровки базовых оптоэлектронных датчиков угла поворота углоизмерительной установки (КИДУ)
Разработан модифицированный алгоритм кросс-калибровки базовых (референтного и рабочего) оптоэлектронных датчиков угла поворота (ОЭДУ) углоизмерительной установки модели АЭ.1686. С его помощью удаётся полностью учесть искажающий вклад, вносимый как систематической составляющей погрешности шкалы датчика, используемого в качестве эталона сравнения, так и систематической составляющей шкалы, которая является объектом калибровки. Это становится возможным при точном согласовании параметров процесса кросс-калибровки и характеристики узлов калибруемого датчика. Так называемый принцип когерентности комплементарных гребенчатых фильтров, предложенный в лаборатории, позволяет минимизировать остаточный искажающий вклад, вносимый шкалой датчика, используемого в качестве эталона сравнения, практически до нуля.
Экспериментальный стенд для контроля базовых датчиков КИДУ
2021
1. Подсистема предварительно программируемой фокусировки микрообъектива углоизмерительной установки.
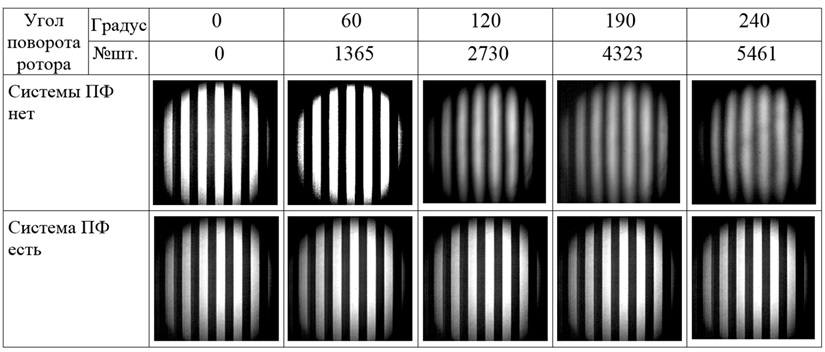
Разработан метод повышения стабильности работы круговой измерительно-диагностической установки (КИДУ) модели АЭ.1686 с использованием режима измерений с предварительно программируемой фокусировкой микрообъектива (ППФМ). Контролируемая структура сканируется по предварительно избранной траектории с остановками в выбранных точках, в которых уточняются условия фокусировки микрообъектива. Параметры управления фокусировкой микрообъектива в этих точках запоминаются в блоке оперативной памяти ППФМ с целью последующего использования их в ходе измерительного процесса. Подсистема ППФМ считывающей головки КИДУ модели АЭ.1686, выполнена на основе линейного позиционирующего столика модели Nano-OP65M фирмы Mad City Labs (США). Эффективность применения режима префокусировки в установке АЭ.1686 представлена в таблице №1 микроизображениями топологии растра с числом штрихов N = 8192 в различных угловых позициях поворотного стола с выключенной и с включенной подсистемой префокусировки.
Таблица №1
2. Метод имитационного компьютерного моделирования перспективного технологического оборудования на базе эмуляции в памяти компьютера.
Усовершенствована модель HTTP-фильтра и ее программная реализация. Проведены эксперименты по имитационному моделированию работы HTTP-фильтра на стандартном ПК с Intel Xeon E5-1650 ЦПУ и 16Gb памяти. Модель обеспечила обработку виртуального трафика интенсивностью около 19 Гбит/с.
2016 г.
с.н.с. Будниковым К.И. и н.с. Курочкиным А.В. предложен и. запатентован Способ фильтрации потока HTTP-пакетов на основе пост-анализа запросов к Интернет-ресурсу и устройство фильтрации для его реализации.
Изобретение относится к области компьютерных сетей и может быть использовано для ограничения доступа пользователей к выделенным ресурсам сети Интернет по протоколу HTTP. Решение использует пост-анализ (последующий анализ) пользовательского запроса к Интернет-ресурсу, когда поток пакетов (включая запрос к Интернет-ресурсу) пропускается через фильтрующее устройство без обработки, а анализ пользовательского запроса к Интернет-ресурсу проводится в промежуток времени между его отправкой к web-серверу и приемом ответа на него от web-сервера.
Техническая эффективность изобретения по сравнению с аналогичными устройствами фильтрации по адресу HTTP заключается в уменьшении времени задержки прохождения через устройство фильтрации пользовательского запроса к Интернет-ресурсу, в увеличении числа обслуживаемых пользователей, а так же в расширении функциональных возможностей и ассортимента устройств данного назначения. Имитационное компьютерное моделирование показало уменьшение среднего времени прохождения пользовательского запроса к web-ресурсу через эмулируемое устройство фильтрации, которое использовало способ фильтрации, предложенный в изобретении, до 14% по сравнению с устройством, которое использовало традиционный способ фильтрации. По сравнению с устройствами фильтрации по IP-адресу изобретение позволяет осуществлять фильтрацию конкретного ресурса провайдера, а не всех ресурсов, принадлежащих фильтруемому IP-адресу.
При использовании провайдерами доступа к сети Интернет изобретение позволяет подключить большее количество абонентов и увеличить доход от абонентской платы. Устройство фильтрации, установленное в организации, позволяет ограничивать доступ в рабочее время к развлекательным ресурсам Интернет, а также ресурсам с плохой репутацией из установленного в организации дополнительного списка. Возможна установка фильтров в учебных заведениях для ограничения доступа к информации, не предназначенной для учащихся.
Изобретение рекомендовано Федеральным институтом промышленной собственности (ФИПС) для включения в список перспективных российских изобретений за 2016г.
2015 г.
Разработаны и реализованы алгоритмы и аппаратные средства для расширения возможностей АСУ Большого солнечного вакуумного телескопа (БСВТ) с сидеростатной питающей оптикой (поселок Листвянка, Байкал).
Для установки центра изображения Солнца на щель спектрографа разработан и реализован алгоритм автоматического наведения телескопа на Солнце. Для текущих значений времени суток и даты по эфемеридам рассчитывается значение позиции энкодеров зеркала сидеростата и координатометра. Время определяет положение палетки координатометра по X, зеркала сидеростата по α; дата – положение зеркала по δ. Координатометр и зеркало сидеростата переводятся в расчетные положения с погрешностью определяемой разрешением энкодеров, при этом изображение солнца обязательно попадет хотя бы на один из четырех датчиков модуля слежения. После этого двигатели сканирования зеркала сидеростата α и δ переводятся в режим микропрограммного управления, в котором их скорость и направление вращения определяются знаком и величиной рассогласований, формируемых модулем слежения по направлениям X (совпадает с α) и Y. Изображение солнца будет смещаться к центру палетки до тех пор, пока оба сигнала рассогласования не станут равны нулю. В результате центр изображения солнца будет расположен в центре палетки.
В автоматическом наведении телескопа участвуют подсистемы сидеростата, координатометра и модуль слежения.
 Подсистема сидеростата обеспечивает наведение телескопа на Солнце, удержание заданного участка изображения на регистрирующей аппаратуре, сканирование фрагмента его изображения, быстрое перемещение точки наблюдения между удаленными друг от друга фрагментами изображения Солнца.
Подсистема сидеростата обеспечивает наведение телескопа на Солнце, удержание заданного участка изображения на регистрирующей аппаратуре, сканирование фрагмента его изображения, быстрое перемещение точки наблюдения между удаленными друг от друга фрагментами изображения Солнца.
 Подсистема слежения имеет четыре датчика края солнечного диска расположенных на палетке координатометра, обеспечивающих определение центра его изображения в условиях частичного виньетирования и изменяющихся в зависимости от времени года угловых размеров Солнца с погрешностью не более 0,5 угловых сек.
Подсистема слежения имеет четыре датчика края солнечного диска расположенных на палетке координатометра, обеспечивающих определение центра его изображения в условиях частичного виньетирования и изменяющихся в зависимости от времени года угловых размеров Солнца с погрешностью не более 0,5 угловых сек.
Для улучшения оптических характеристик телескопа разработаны и реализованы алгоритм и аппаратура управления градиентом температуры, которые обеспечивают заданную разность температур между центром и краем защитной стеклянной пластины верхнего иллюминатора вакуумной трубы телескопа.
Градиент температуры измеряется с помощью термопар и поддерживается изменением температуры тосола в теплообменнике, заложенном в оправу края оптической пластины иллюминатора. В зависимости от знака градиента, теплоноситель либо охлаждает, либо подогревает оправу. Оператор имеет возможность вносить поправку в градиент температуры на основании визуального наблюдения интерферограммы верхнего иллюминатора.
Аппаратные средства для точного измерения градиента температуры разработаны на основе измерительного модуля MOXA ioLogik E1262. Для обеспечения необходимой точности использован дополнительный измерительный усилитель и дифференциальное подключение термопар, установленных в центре стекла и на его оправе. Такое решение позволило непосредственно измерять разность температур стекла и оправы и исключить необходимость калибровки термопар и учёта их нелинейности.
Работа выполнялась в рамках программы фундаментальных научных исследований ИАиЭ СО РАН, пункт IV.35.1.6, № гос. рег. 1201366865; государственного задания ИСЗФ СО РАН - проект №16.3.3; контракта на выполнение НИОКР № 61- 08/2012.
2014 г.
Создана и введена в опытную эксплуатацию АСУ Большого солнечного вакуумного телескопа (БСВТ) с гелиостатной питающей оптикой (поселок Листвянка, Байкал). Автоматизированы наблюдения за процессами, происходящими на Солнце, а также работа вспомогательных подсистем телескопа: вакуумирования, термокомпенсации входного иллюминатора, разгрузки зеркала. Создана подсистема гидирования, обеспечивающая автоматическое перемещение заданной точки изображения Солнца на визуализирующую и регистрирующую аппаратуру с погрешностью наведения (по азимуту и углу места) - не более 0,5''. Время от момента освещения Солнцем любого из четырех датчиков модуля слежения (рис.1) до перемещения заданной точки изображения Солнца в центр регистратора (соответствует центру щели спектрографа) - не более 60 сек.
Создано программное обеспечение, которое позволяет проводить управление телескопом и исследование Солнца в ручном и автоматическом режиме как при работе с отдельными подсистемами, так и для решения более сложных задач, связанных с взаимодействием нескольких подсистем.
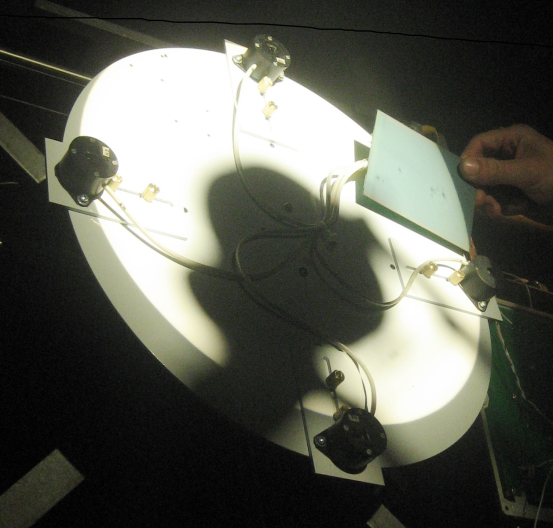
Рис.1. Датчики модуля слежения
Кроме расширения функциональных возможностей, например, автоматическое заведение изображения Солнца в трубу телескопа, существенно облечена работа оператора во время проведения наблюдений, а также упрощена настройка и юстировка.
С учетом того, что телескоп является инструментом проведения научных исследований и подразумевает постоянное расширение круга решаемых им задач, создана и экспериментально проверена архитектура программного обеспечения, которая позволяет:
- использовать отработанные на одном телескопе алгоритмы управления устройствами, подсистемами и технологическими процессами на других телескопах;
- интегрировать в уже существующее программное обеспечение АСУ функционально сопоставимые, но разные типы устройств;
- использовать разные операционные системы (Windows, Linux) в качестве базовой платформы для АСУ БСВТ;
- интегрировать в основное программное обеспечение АСУ специализированные программы, позволяющие существенно упростить и облегчить программирование прикладных задач, возникающих при проведении научных экспериментов на телескопе, характеризующихся наличием большого количества взаимозависимых процессов (заведение, сканирование, написание технологических программ);
- проводить отладку некоторых узлов программного обеспечения в условиях отсутствия реального оборудования, на основе комплексного набора средств виртуальной отладки.
Разработана и создана программная модель устройства, фильтрующего запросы от WEB-клиента к WEB-серверу по протоколу HTTP с использованием исследованных ранее алгоритмов: внепланового закрытия HTTP-сессии и маскирования ответных данных. Устройство имеет две симметричные точки подключения и устанавливается в разрыв соединения между сетью клиента и сетью сервера. Модель состоит из двух равнозначных каналов, которые обеспечивают прохождение через устройство и фильтрацию пакетного трафика.

Рис. 2. Общий вид УИМ АЭ.1686
Разработан и создан экспериментальный образец углоизмерительной машины (УИМ) модели АЭ.1686 (рис. 2), предназначенной для измерения и определения угловых параметров и других характеристик рабочих образцов и фотошаблонов оптических лимбов, круговых шкал, растров и многоразрядных кодовых дисков (далее углоизмерительные структуры – УИС) в автоматическом режиме:
- углового положения границ элементов топологии;
- угловой привязки положений элементов топологии, находящихся на разных радиусах;
- углового положения диаметров элементов топологии;
- углового положения осей элементов топологии;
- углового отклонения положения границ элементов топологии;
- отклонения положения осей от номинальных значений, указанных в конструкторской документации (КД);
- ширины и разности ширины элементов топологии.
Проведены предварительные испытания и получены следующие характеристики установки.
Предварительные технические характеристики УИМ АЭ.1686
|
№ п/п
|
Параметр
|
Значение
|
|
1
|
Рабочий диаметр стола, мм.
|
210
|
|
2
|
Частота вращения стола. об/с.
|
1
|
|
3
|
Горизонтальный ход считывающей головки, мм.
|
125
|
|
4
|
Вертикальный ход считывающей головки, мм
|
25
|
|
5
|
Погрешность измерения углового положения границ элементов топологии, угл. с.
|
1
|
|
6
|
Погрешность измерения угловой привязки положений элементов топологии, находящихся на разных радиуса, угл. с
|
1
|
|
7
|
Погрешность определения ширины элементов топологии, мкм
|
± 0,1
|
|
8
|
Погрешность определения ширины и разности ширины элементов топологии, мкм
|
± 0,1
|
2013 г.
Для управления Большим солнечным вакуумным телескопом разработана автоматизированная система, имеющая распределенную архитектуру, основанная на АРМ контроллерах подключаемых по каналам Ethernet к компьютеру астронома - оператора.
Такой выбор обусловлен следующими особенностями:
- большим количеством подсистем обеспечивающих процесс наблюдения (автоматической ориентации телескопа на солнце, выбора и гидирования заданной точки Солнца, сканирования его области, получения спектров, мониторинга видеоизображений);
- большим количеством подсистем обеспечивающих уникальные (прост-ранственное разрешение 0,2 угл. с.) характеристики телескопа (вакуумирования, разгрузки зеркала сидеростата, термокомпенсации входного иллюминатора);
- внушительными размерами телескопа (фокусное расстояние - 40м).
Контроллеры обеспечивают управление двигателями и другими исполнительными устройствами подсистем в соответствии с алгоритмом текущего эксперимента наблюдений Солнца. В составе АСУ имеются видеокамеры и мобильный пульт управления – переносной компьютер с каналом Wi-FI.
Предложен метод построения системы контроля погрешности формирования прецизионных углоизмерительных структур датчиков, входящих в состав систем управления позиционированием главных зеркал комплексов наблюдения за космическим пространством.
Прецизионные датчики угла поворота, входящие в состав систем управления позиционированием главных зеркал оптических комплексов наблюдения космического пространства не имеют собственной подшипниковой системы и размещаются непосредственно на осях, угол поворота которых они должны контролировать. Эта особенность используемых датчиков определяет специфические пути построения систем контроля геометрии их кодирующих узлов, причём в идеале эти системы должны обеспечить контроль структур с погрешностью не хуже ± 0,05".
Для достижения поставленной цели предложено использовать дифференциальный принцип измерения характеристик контролируемых углоизмерительных структур (патент РФ № 83133), суть которого состоит в том, что с помощью прецизионного референтного углового датчика производится одновременное измерение погрешности положения элементов топологии двух других структур, из которых одна является контролируемой структурой, а вторая – рабочей. При этом предполагается, что паспортные характеристики рабочей структуры должны быть известны с необходимой точностью.
2010-2012 гг.
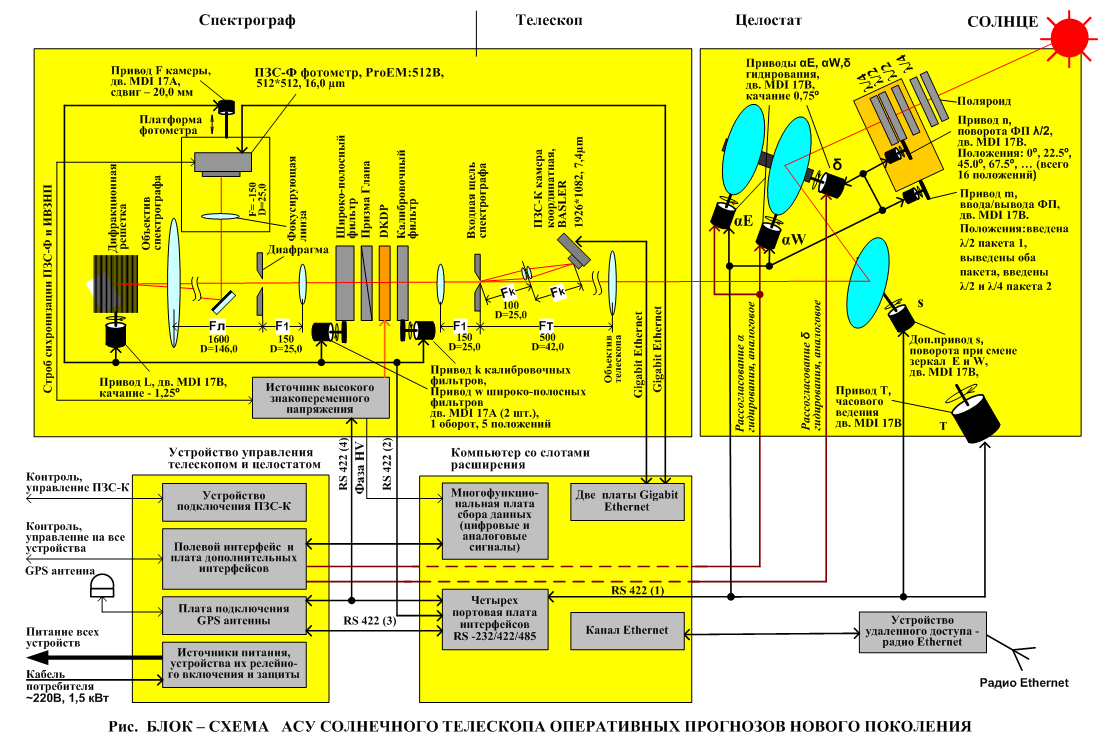
В лаб. 16 ИАиЭ СО РАН разработан аппаратно-программный комплекс автоматизированного управления тремя солнечными телескопами оперативных прогнозов нового поколения (СТОП 1-3) созданными ИСЗФ СО РАН и предназначенными для получения экспериментальных данных о крупномасштабных магнитных полях (КМП) Солнца.
Аппаратная часть системы управления телескопа обеспечивает непосредственный доступ к контролю и управлению устройствами телескопа: шаговыми двигателями приводов, высоковольтным источником, ТВ камерами подсистем гидирования и получения спектра. Инструментальное и прикладное программное обеспечение телескопов СТОП 1-3 разработано с использованием кросс - платформенного инструментария QT (http://qt.nokia.com/). Прикладная часть ПО с помощью графического интерфейса оператора (ГИО) позволяет отображать состояние узлов телескопа, показывать изображение спектра и видимое изображение солнца, формировать задание программе сканирования диска Солнца. Подсистема слежения обеспечивает перемещение изображения солнечного диска относительно входной щели спектрографа и удерживание его во время измерения. Установка поляризационных фильтров, калибровочных пластин производится также с использованием ГИО.
Реализовано программное обеспечение автоматической настройки и калибровки аппаратуры телескопа, в том числе: фокусировки камеры спектрографа, определения текущего значения полуволнового напряжения оптического модулятора и текущего (суточного) угла направления сканирования (положение оптической щели спектрографа) относительно оси вращения Солнца.
Обеспечено автоматическое сканирование диска Солнца с заданным растром, что позволило получать данные для расчета магнитограммы Солнца. Типовой шаг сканирования около 30'', время получения данных полной магнитограммы Солнца -15 минут.
Сотрудники лаб. К.И. Будников, А.А. Лубков, С.А. Лылов за настройкой СТОП 1


Целостат телескопа СТОП 1,
Байкальская астрофизическая обсерватория (поселок Листвянка)
Оптическая скамья телескопа СТОП 1
2004-2008 гг.
• Создана автоматизированная система технического обслуживания и управления (АСТОУ) Новосибирской ГЭС.
• Разработан цифровой комплекс управления установкой выращивания монокристаллов кремния 221УМК090 завода КРАСМАШ (г. Красноярск).
• Выполнена автоматизация солнечного телескопа оперативных прогнозов Саянской солнечной обсерватории Института солнечно-земной физики СО РАН.
• Создана информационно-управляющая система для моделирующего комплекса выращивания крупногабаритных монокристаллов.
АСТОУ Новосибирской ГЭС
|
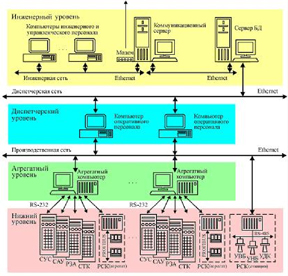 |
АСТОУ Новосибирской ГЭС - характерный пример решения задачи распределенного сбора, обработки данных, их анализа и последующего управления агрегатами и подсистемами с интерактивным участием и при определяющей роли операторов и другого инженерно-технического персонала ГЭС. Она представляет собой 4-х уровневую иерархическую систему. Если учесть, что на уровне каждого из агрегатов содержится до восьми подсистем, каждая из которых как минимум включает контроллер, то общее количество интеллектуальных звеньев на нижнем, агрегатном и диспетчерском уровнях приближается к сотне, а общее количество обслуживаемых параметров- к 5000 шт. |
Цифровой комплекс управления установкой выращивания монокристаллов кремния по методу Чохральского
|
 |
Цифровой комплекс управления установкой выращивания монокристаллов кремния по методу Чохральского. Комплекс обеспечивает сбор, архивирование и документирование данных о параметрах процесса; имеет визуальный и звуковой интерфейсы оператора; сенсорное управление в ручном режиме; осуществляет автоматическое управление процессом по заданной технологом программе.
Комплекс состоит из высоконадежных электронных компонентов, включая контроллер и два компьютера промышленного исполнения. Комплекс оснащен прецизионными приводами и специализированными датчиками: диаметра кристалла, уровня и касания расплава, привязки координаты затравки, температуры расплава и нагревателя. Комплекс позволяет проводить удаленный мониторинг процесса с компьютера технолога, на котором создается и редактируется технологическая программа, обеспечивается анализ и документирование параметров процесса. Общая длина кристалла, выращенного в процессе экспериментальной плавки, составила 1432 мм . |
Автоматизированная система управления cолнечным телескопом оперативных прогнозов
|
 |
В 2007 году проведены исследование, разработка, ввод и начата эксплуатация автоматизированной системы управления солнечным телескопом оперативных прогнозов Саянской c олнечной обсерватории Института солнечно-земной физики СО РАН .
Созданная система позволила обеспечить заданные точности перемещений и быстродействие исполнительных механизмов. Экспериментально подтвержде-на работоспособность подсистемы слежения за положением изображения Солнца в условиях солнечной погоды с восхода до заката Солнца, а также при наличии легких облаков. |
Информационно-управляющая система для экспериментальных исследований роста крупногабаритных монокристаллов
|
| |
В 2008г создана информационно-управляющая система, предназначенная для экспериментальных исследований по физическому моделированию процесса выращивания монокристаллов методом Чохральского на моделирующем комплексе Института теплофизики СО РАН. Архитектура автоматизированной системы отличается отсутствием промежуточных контроллеров. В ней устройства сбора данных и управления подключены непосредственно к компьютеру по каналам связи. Система обеспечивает автоматическое или ручное управление экспериментом, в том числе устройствами, расположенными на подвижных конструкциях. Регулируются скорости вращения тигля и модели кристалла, температуры расплава и охладителя кристалла, обеспечено измерение температуры в объеме расплава. |
")
")