")
")
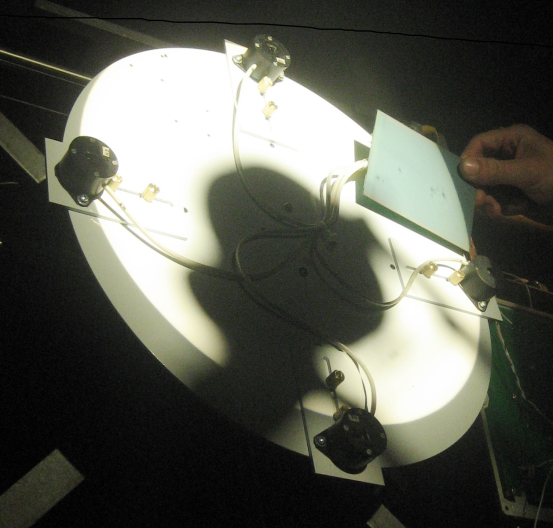
Research Results 162014 г.Создана и введена в опытную эксплуатацию АСУ Большого солнечного вакуумного телескопа (БСВТ) с гелиостатной питающей оптикой (поселок Листвянка, Байкал). Автоматизированы наблюдения за процессами, происходящими на Солнце, а также работа вспомогательных подсистем телескопа: вакуумирования, термокомпенсации входного иллюминатора, разгрузки зеркала. Создана подсистема гидирования, обеспечивающая автоматическое перемещение заданной точки изображения Солнца на визуализирующую и регистрирующую аппаратуру с погрешностью наведения (по азимуту и углу места) - не более 0,5''. Время от момента освещения Солнцем любого из четырех датчиков модуля слежения (рис.1) до перемещения заданной точки изображения Солнца в центр регистратора (соответствует центру щели спектрографа) - не более 60 сек.
Рис.1. Датчики модуля слежения Кроме расширения функциональных возможностей, например, автоматическое заведение изображения Солнца в трубу телескопа, существенно облечена работа оператора во время проведения наблюдений, а также упрощена настройка и юстировка. Разработана и создана программная модель устройства, фильтрующего запросы от WEB-клиента к WEB-серверу по протоколу HTTP с использованием исследованных ранее алгоритмов: внепланового закрытия HTTP-сессии и маскирования ответных данных. Устройство имеет две симметричные точки подключения и устанавливается в разрыв соединения между сетью клиента и сетью сервера. Модель состоит из двух равнозначных каналов, которые обеспечивают прохождение через устройство и фильтрацию пакетного трафика.
Рис. 2. Общий вид УИМ АЭ.1686
Разработан и создан экспериментальный образец углоизмерительной машины (УИМ) модели АЭ.1686 (рис. 2), предназначенной для измерения и определения угловых параметров и других характеристик рабочих образцов и фотошаблонов оптических лимбов, круговых шкал, растров и многоразрядных кодовых дисков (далее углоизмерительные структуры – УИС) в автоматическом режиме: Проведены предварительные испытания и получены следующие характеристики установки. Предварительные технические характеристики УИМ АЭ.1686
|
|
Institute of Automation and Electrometry of the Siberian Branch of the Russian Academy of Sciences |
 |
-
Home

-
Labs Pages
-
Laboratory 16
-
Research Results 16
- Результаты 2014

|
|