")
")
Научные и прикладные результаты лаборатории 13Результаты за 2017 годИсследование и разработка подходов одновременной локализации и построения карты для управления наземным транспортным средством.Основной результатРазработаны метод локализации управляемого объекта по визуальным маркерам, алгоритм начального предсказания позиции объекта, два подхода замыкания циклов. Предложенные подходы и методы позволили устранить или существенно снизить основные проблемы, препятствующие применению SLAM систем, основанных на использовании лидара, такие как:
Разработанные подходы универсальны и могут быть применены к различным SLAM системам, основаным на использовании лидара. Содержание работы В существующих системах CoreSLAM, Gmapping и др. используется лидар для нахождения статических объектов в окружающем пространстве, относительно которых происходит локализация управляемого объекта, но информации полученной от данного устройства недостаточно для локализации в однородной местности с небольшой погрешностью. В связи с этим было предложено внедрить в систему дополнительный оптический датчик – камеру. Для позиционирования камеры предлагается использовать визуальные маркеры, расположенные в окружающей местности, с известными координатами. Таким образом, в качестве дополнительных входных данных в фильтр частиц, который используется в CoreSLAM, добавляются рассчитанные позиция и ориентация объекта по маркерам. Итоговый вес частицы представлен как сумма весовых оценок локализации по данным с лидара и локализации по маркерам. Стоит отметить, что наличие визуальных маркеров в окружении не жесткое требование для корректной работы SLAM системы, а дополнительная возможность для более точной локализации управляемого объекта и построения карты местности.В существующих системах CoreSLAM, Gmapping и др. используется лидар для нахождения статических объектов в окружающем пространстве, относительно которых происходит локализация управляемого объекта, но информации полученной от данного устройства недостаточно для локализации в однородной местности с небольшой погрешностью. В связи с этим было предложено внедрить в систему дополнительный оптический датчик – камеру. Для позиционирования камеры предлагается использовать визуальные маркеры, расположенные в окружающей местности, с известными координатами. Таким образом, в качестве дополнительных входных данных в фильтр частиц, который используется в CoreSLAM, добавляются рассчитанные позиция и ориентация объекта по маркерам. Итоговый вес частицы представлен как сумма весовых оценок локализации по данным с лидара и локализации по маркерам. Стоит отметить, что наличие визуальных маркеров в окружении не жесткое требование для корректной работы SLAM системы, а дополнительная возможность для более точной локализации управляемого объекта и построения карты местности.Чтобы избежать требования на наличие внешнего устройства для получения одометрии, было предложено создать алгоритм для первоначальной оценки позиции объекта в случае отсутствия одометра. Основная идея заключается в следующем. На каждой итерации после использования фильтра частиц система сохраняет N частиц с наибольшими весами. Вначале каждой итерации, система располагает только двумя последними наборами частиц. То есть на шаге m система имеет два множества точек Km-1 и Km-2. Чтобы получить первоначальное предсказание позиции объекта (перед применением фильтра частиц), предлагается провести линейную экстраполяцию между всеми парами точек из двух множеств с последующим вычислением веса для каждой частицы из полученного набора с учетом текущих данных лидара и глобальной карты препятствий. Частица с наибольшим весом выбирается в качестве начального предсказания позиции управляемого объекта.Разработанный алгоритм замыкания циклов состоит из двух частей, которые направлены на уточнение позиции управляемого объекта, предсказанной с помощью фильтра частиц по глобальной карте препятствий (карта, содержащая все данные полученные с лидара). Первая часть сохраняет карту препятствий и текущую оценку позиции управляемого объекта на данной карте при условии, что объект находится в неисследованной области. Неисследованная область определяется с помощью проверки принадлежности предсказанной позиции к некоторой окрестности уже сохраненных точек. В случае попадания предсказанной позиции в окрестность сохраненной точки, выполняется вторая часть алгоритма замыкания циклов, которая проводит повторную локализацию по соответствующей сохраненной карте. Поскольку точность карты препятствий связана с погрешностью оценки позиции объекта и погрешность накапливается со временем, ранее сохраненная карта не менее точна, чем глобальная карта. Таким образом, проведя повторную оценку позиции по сохраненной карте можно сократить накопленную ошибку оценки позиции объекта (см. рис.).
Недостатком данного подхода является большой расход оперативной памяти, связанный с хранением глобальных карт препятствий. Для решения этой проблемы в алгоритме замыкания циклов было предложено сохранять не глобальные карты препятствий с обработанными данными лидара, а локальные, которые содержат некоторый набор сырых данных с лидара и позиции управляемого объекта в момент сбора информации. Для решения проблемы связанной с повторной локализацией управляемого объекта по сохраненной карте использовался метод выравнивания сканов, основанный на итеративном алгоритме ближайших точек.
Использование современных компьютерных архитектур для обработки данных на примере решения задачи распространения волн.Основной результатРазработаны аппаратные и программные методы значительного ускорения расчётов высот волны до момента прибытия цунами к берегу без ущерба для точности. Предложены методы реализации разностных вычислительных схем Мак-Кормака на архитектуре FPGA. Предложенные методы позволяют сократить время моделирования волны цунами для более раннего определения опасных прибрежных зон. Содержание работы В последние годы наблюдается рост числа катастрофических наводнений сейсмической природы в различных регионах мирового океана и существенное усиление их влияния на жизнедеятельность населения в прибрежной полосе. Современные средства компьютерного моделирования позволяют достаточно точно рассчитать профиль по крайней мере первого периода волны цунами по известной начальной форме волны в источнике (то есть над зоной подвижки морского дна). Однако, важнейшим параметром любой системы предупреждения об опасности цунами является время, необходимое для формирование обоснованного прогноза.В последние годы наблюдается рост числа катастрофических наводнений сейсмической природы в различных регионах мирового океана и существенное усиление их влияния на жизнедеятельность населения в прибрежной полосе. Современные средства компьютерного моделирования позволяют достаточно точно рассчитать профиль по крайней мере первого периода волны цунами по известной начальной форме волны в источнике (то есть над зоной подвижки морского дна). Однако, важнейшим параметром любой системы предупреждения об опасности цунами является время, необходимое для формирование обоснованного прогноза.Исходными данными для любой системы предупреждения о цунами являются параметры источника волны. После восстановления начального смещения водной поверхности в очаговой области следует решать прямую задачу распространения волны цунами от известного очага до защищаемых участков на побережье. Обычно этот процесс моделируется путём численного решения системы дифференциальных уравнений гидродинамики в рамках приближения теории мелкой воды, применяя один из разработанных и протестированных методов. Службой предупреждения о цунами США используется программный пакет MOST (Method of Splitting Tsunamis). Ввиду необходимости выполнения условия устойчивости, накладывающего ограничения на величину шага по времени, численный расчёт на достаточно детальной сетке может потребовать слишком много времени и может не дать оценок ожидаемых высот волны до момента прибытия цунами к берегу. В связи с этим авторами были разработаны аппаратные и программные методы значительного ускорения этих расчётов без ущерба для их точности.В пакете MOST для численного моделирования движения волны цунами по водной акватории используется следующий эквивалентный вид так называемой системы мелкой воды без учёта внешних сил (донное трение, сила Кориолиса и т.д.).
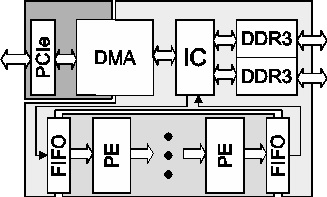
Для моделирования был использован аппаратный вычислитель на базе FPGA Xilinx Virtex-7 VC709. Блок-схема архитектура спецпроцессора представлена на рисунке.
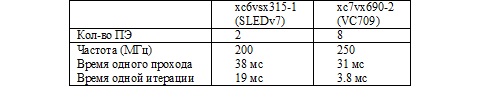
Помимо самого вычислителя спецпроцессор имеет контроллеры памяти DDR3, контроллер PCIe, модуль DMA, обеспечивающий взаимодействие вычислителя с памятью компьютера-хоста в режиме прямого доступа. Данные поступают в вычислитель из памяти через FIFO, что позволяет легко варьировать частоту отдельных вычислительных блоков, подстраиваясь под конкретный кристалл FPGA и характеристики внешней памяти и интерфейсов. Сам вычислитель, в зависимости от доступных ресурсов FPGA, состоит из одного или нескольких процессорных элементов. Спроектированный вычислитель на уровне алгоритмов был протестирован с применением технологий HLS. Модули, обеспечивающие работу всего процессора, были протестированы с помощью RTL-симуляторов. Помимо самого вычислителя спецпроцессор имеет контроллеры памяти DDR3, контроллер PCIe, модуль DMA, обеспечивающий взаимодействие вычислителя с памятью компьютера-хоста в режиме прямого доступа. Данные поступают в вычислитель из памяти через FIFO, что позволяет легко варьировать частоту отдельных вычислительных блоков, подстраиваясь под конкретный кристалл FPGA и характеристики внешней памяти и интерфейсов. Сам вычислитель, в зависимости от доступных ресурсов FPGA, состоит из одного или нескольких процессорных элементов. Спроектированный вычислитель на уровне алгоритмов был протестирован с применением технологий HLS. Модули, обеспечивающие работу всего процессора, были протестированы с помощью RTL-симуляторов. Для практической реализации и тестирования были использованы платформа VC709 на базе кристалла Virtex-7 xc7vx690-2 и SLEDv7 на базе кристалла Virtex-6 xc6vsx315-1.
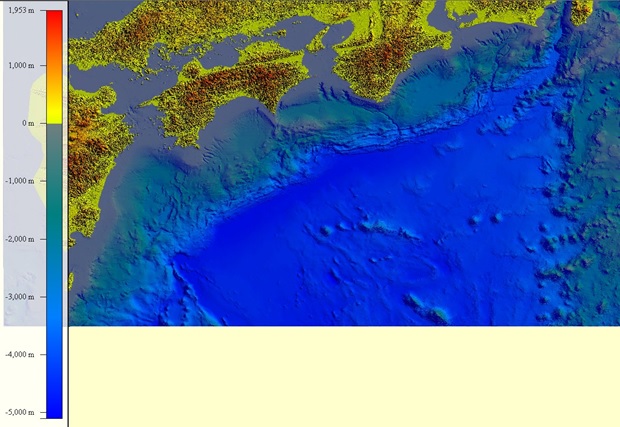
Тесты проводились на батиметрии южной части Японии (см. рис.):
Временной шаг составлял 0.5 секунд.
По результатам моделирования, время распространения волны от южной границы батиметрии до побережья составило 25секунд. При этом время достижения волной берега составило 3200 секунд модельного времени.По результатам моделирования, время распространения волны от южной границы батиметрии до побережья составило 25секунд. При этом время достижения волной берега составило 3200 секунд модельного времени.Данные результаты позволяют сделать вывод о целесообразности применения программно-аппаратного решения на базе FPGA для моделирования распространения волн цунами после произошедшего события. |
|
Федеральное государственное бюджетное учреждение науки Институт автоматики и электрометрии Сибирского отделения Российской академии наук |

|
|